引言
卷积是图像神经网络中的重要组成部分,它担起提取特征的重任,每当你编写一个网络结构的时候,它总会大喊"我来组成头部!",这么重要的头部自然值得我们好好地重视起来了"认真脸jpg",本篇文章将回顾那些年的一些经典卷积神经网络,并提炼要点且从以下几方面来进行阐述。
-
可供参考的资料、ImageNet 1000分类效果(采用224大小图片的效果,部分来自paperwithcode部分来自论文自身)。
-
-
-
神经网络架构
(63.3% - 2012) AlexNet
论文:
ImageNet Classification with Deep Convolutional Neural Networks
(https://proceedings.neurips.cc/paper/2012/file/c399862d3b9d6b76c8436e924a68c45b-Paper.pdf)
Blog :
AlexNet: The First CNN to win Image Net
(https://www.kaggle.com/code/blurredmachine/alexnet-architecture-a-complete-guide/notebook)
效果:
ImageNet top-1 accuracy
63.3%
结构图:

成就
-
第一个在ImageNet上跑起来的神经网络,在当年的竞赛中成绩大幅度领先第二名。
创新
-
2张GTX580 3G显存上训练百万级别的数据,在模型训练上做了一些工程的改进,现在单张A100显存能到80G,足以见当年的艰难。
-
使用大卷积(11x11、5x5)和 全连接层,事实证明潮流是一个cycle,现在大卷积又开始流行起来了= =。
-
-
Dropout:防止过拟合,有模型ensemble的效果,后续应用广泛。
-
Local Response Normalization:一种正则化方法帮助模型更好的训练,后续基本没人用,大家可以阅读原文了解下。
代码:
class AlexNet(nn.Module):
def __init__(self, num_classes: int = 1000) -> None:
super(AlexNet, self).__init__()
self.features = nn.Sequential(
nn.Conv2d(3, 64, kernel_size=11, stride=4, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(64, 192, kernel_size=5, padding=2),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Conv2d(192, 384, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(384, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.Conv2d(256, 256, kernel_size=3, padding=1),
nn.ReLU(inplace=True),
nn.MaxPool2d(kernel_size=3, stride=2),
)
self.avgpool = nn.AdaptiveAvgPool2d((6, 6))
self.classifier = nn.Sequential(
nn.Dropout(),
nn.Linear(256 * 6 * 6, 4096),
nn.ReLU(inplace=True),
nn.Dropout(),
nn.Linear(4096, 4096),
nn.ReLU(inplace=True),
nn.Linear(4096, num_classes),
)
def forward(self, x: torch.Tensor) -> torch.Tensor:
x = self.features(x)
x = self.avgpool(x)
x = torch.flatten(x, 1)
x = self.classifier(x)
return x
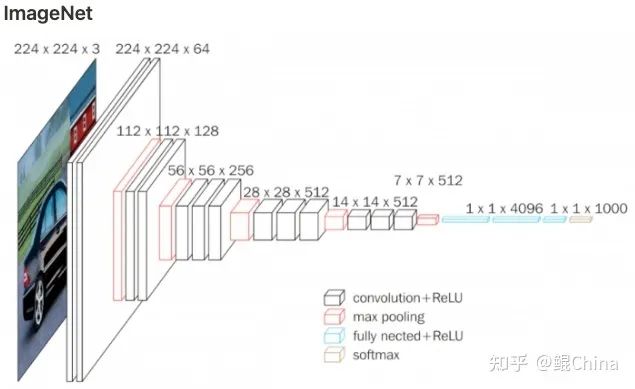
(74.5% - 2014) VGG
论文:
Very Deep Convolutional Networks for Large-Scale Image Recognition
(https://link.zhihu.com/?target=https%3A//arxiv.org/abs/1409.1556)
Blog:
一文读懂VGG网络
(https://zhuanlan.zhihu.com/p/41423739)
效果:
ImageNet top-1 accuracy
74.5%
结构图:
成就:
ImageNet成绩大幅超过AlexNet,引领了未来网络朝着深度加深的方向进行。
创新:
使用3X3卷积核代替11X11, 5X5,将网络的深度做进一步加深的同时引入更多的非线性层。
代码:
import torch.nn as nn
cfg = {
"vgg11": [64, "M", 128, "M", 256, 256, "M", 512, 512, "M", 512, 512, "M"],
"vgg13": [64, 64, "M", 128, 128, "M", 256, 256, "M", 512, 512, "M", 512, 512, "M"],
"vgg16": [64, 64, "M", 128, 128, "M", 256, 256, 256, "M", 512, 512, 512, "M", 512, 512, 512, "M"],
"vgg19": [64, 64, "M", 128, 128, "M", 256, 256, 256, 256, "M", 512, 512, 512, 512, "M", 512, 512, 512, 512, "M"],
}
class VGG(nn.Module):
def __init__(self, vgg_name, num_outputs=10):
super().__init__()
self.features = self._make_layers(cfg[vgg_name])
self.classifier = nn.Linear(512, num_outputs)
def forward(self, x):
out = self.features(x)
out = out.view(out.size(0), -1)
out = self.classifier(out)
return out
def _make_layers(self, cfg):
layers = []
in_channels = 3
for x in cfg:
if x == "M":
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
layers += [
nn.Conv2d(in_channels, x, kernel_size=3, padding=1),
nn.BatchNorm2d(x),
nn.ReLU(inplace=True),
]
in_channels = x
layers += [nn.AvgPool2d(kernel_size=1, stride=1)]
return nn.Sequential(*layers)
(80.0% - 2016) Inception
论文:
-
Inception V1(https://arxiv.org/pdf/1409.4842v1.pdf)
-
Inception V2&3(https://arxiv.org/pdf/1512.00567v3.pdf)
-
Inception V4(https://arxiv.org/pdf/1602.07261.pdf)
Blog : [A Simple Guide to the Versions of the Inception Network]
(https://towardsdatascience.com/a-simple-guide-to-the-versions-of-the-inception-network-7fc52b863202)
效果:
ImageNet top-1 accuracy 80.00%
结构图:
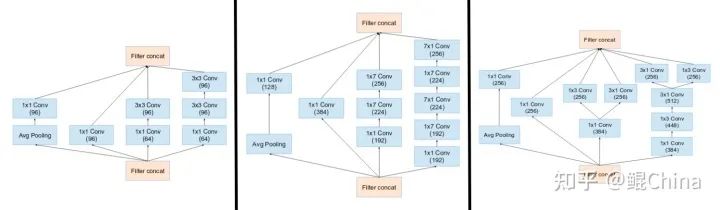
创新:
-
使用多尺度卷积核来提取信息,V1-V4基本就是在做这件事,无非是不断的优化性能。
-
提出了Label Smoothing,这个东西比赛用的挺多的。
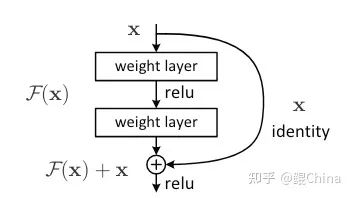
(78.6% - 2015) ResNet
论文:
[Deep Residual Learning for Image Recognition]
(https://arxiv.org/abs/1512.03385)
Blog :
-
Resnet到底在解决一个什么问题呢?
(https://www.zhihu.com/question/64494691/answer/786270699)
-
你必须要知道CNN模型:ResNet
(https://zhuanlan.zhihu.com/p/31852747)
效果:
ImageNet top-1 accuracy
78.2% or 82.4%(
[ResNet strikes back: An improved training procedure in timm]
(https://paperswithcode.com/paper/resnet-strikes-back-an-improved-training)
)
结构图:
成就:
利用残差结构使得网络达到了前所未有的深度同时性能继续提升、同时使损失函数平面更加光滑(看过很多解释,这个个人觉得比较靠谱)
创新:
残差网络
代码:! key是关键代码、其实就一行~
class ResNetBasicBlock(nn.Module):
expansion = 1
def __init__(self, in_planes, out_planes, stride=1):
super().__init__()
self.conv1 = nn.Conv2d(in_planes, out_planes, kernel_size=3, stride=stride, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(out_planes)
self.conv2 = nn.Conv2d(out_planes, out_planes, kernel_size=3, stride=1, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(out_planes)
self.shortcut = nn.Sequential()
# print(f"in_planes : {in_planes} | self.expansion * out_planes : {self.expansion * out_planes}")
if stride != 1 or in_planes != self.expansion * out_planes:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion * out_planes, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion * out_planes),
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
# print(f" conv 1: {out.shape}")
out = self.bn2(self.conv2(out))
# print(f" conv 2: {out.shape}")
out += self.shortcut(x) #! key
# print(f"shortcut: {out.shape}")
out = F.relu(out) # 然后一起relu
# print("===" * 10)
return out
(77.8% - 2016) DenseNet
*
论文:
*Densely Connected Convolutional Networks
(https://arxiv.org/abs/1608.06993)
Blog :
-
CVPR 2017最佳论文作者解读:DenseNet 的“what”、“why”和“how”(https://www.leiphone.com/category/ai/0MNOwwfvWiAu43WO.html)
-
[pytorch源码解读]之DenseNet的源码解读(https://blog.csdn.net/u014453898/article/details/105670550)
效果:
ImageNet top-1 accuracy
77.8%
结构图:
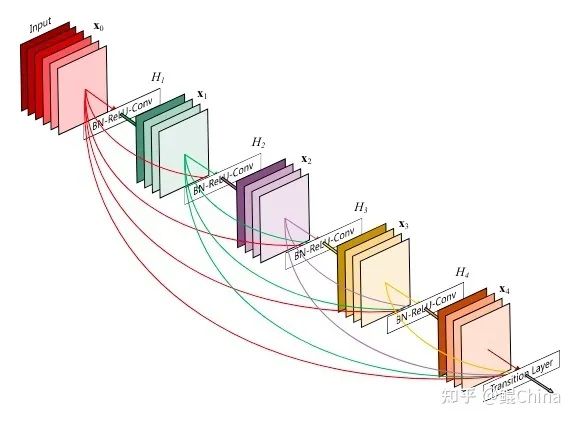
创新:
利用DenseBlock进行新特征的探索和原始特征的多次重用
代码:! key是关键代码、其实就一行~
class Bottleneck(nn.Module):
def __init__(self, in_planes, growth_rate):
super(Bottleneck, self).__init__()
self.bn1 = nn.BatchNorm2d(in_planes)
self.conv1 = nn.Conv2d(in_planes, 4 * growth_rate, kernel_size=1, bias=False)
self.bn2 = nn.BatchNorm2d(4 * growth_rate)
self.conv2 = nn.Conv2d(4 * growth_rate, growth_rate, kernel_size=3, padding=1, bias=False)
def forward(self, x):
out = self.conv1(F.relu(self.bn1(x)))
out = self.conv2(F.relu(self.bn2(out)))
out = torch.cat([out, x], 1) #! key
return out
(80.9% - 2016) ResNext
论文:
ResNext : Aggregated Residual Transformations for Deep Neural Networks
(https://arxiv.org/abs/1611.05431)
Blog :
-
ResNeXt详解
(https://zhuanlan.zhihu.com/p/51075096)
-
ResNeXt的分类效果为什么比Resnet好?
(https://www.zhihu.com/question/323424817/answer/1078704765)
效果:
ImageNet top-1 accuracy
80.9%
结构图:
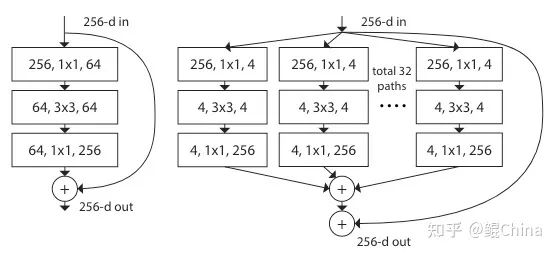
创新:
提出Group的概念、利用Group增加特征的丰富度和多样性,类似multi-head attention。
代码:! key是关键代码、其实就一行~
import torch.nn as nn
import torch.nn.functional as F
class Block(nn.Module):
"""Grouped convolution block."""
expansion = 2
def __init__(self, in_planes, cardinality=32, bottleneck_width=4, stride=1):
super(Block, self).__init__()
group_width = cardinality * bottleneck_width
self.conv1 = nn.Conv2d(in_planes, group_width, kernel_size=1, bias=False)
self.bn1 = nn.BatchNorm2d(group_width)
self.conv2 = nn.Conv2d(
group_width, group_width, kernel_size=3, stride=stride, padding=1, groups=cardinality, bias=False
) #! key
self.bn2 = nn.BatchNorm2d(group_width)
self.conv3 = nn.Conv2d(group_width, self.expansion * group_width, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(self.expansion * group_width)
self.shortcut = nn.Sequential()
if stride != 1 or in_planes != self.expansion * group_width:
self.shortcut = nn.Sequential(
nn.Conv2d(in_planes, self.expansion * group_width, kernel_size=1, stride=stride, bias=False),
nn.BatchNorm2d(self.expansion * group_width),
)
def forward(self, x):
out = F.relu(self.bn1(self.conv1(x)))
out = F.relu(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
out += self.shortcut(x)
out = F.relu(out)
return out
(81.2% - 2016) Res2Net
论文:
Res2Net: A New Multi-scale Backbone Architecture
(https://arxiv.org/pdf/1904.01169.pdf)
Blog:
Res2Net:新型backbone网络,超越ResNet(https://zhuanlan.zhihu.com/p/86331579)
效果:
ImageNet top-1 accuracy 81.23%
结构图:
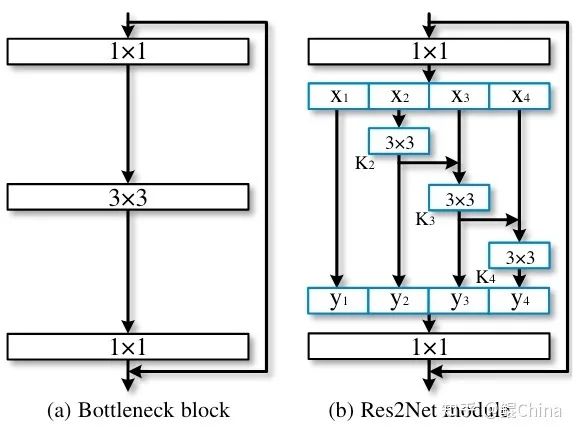
亮点:
将多特征图的处理从layer并行的形势改为hierarchical
代码:
因为修改了特征图的交互为hierarchical,所以代码有点多
class Bottle2neck(nn.Module):
expansion = 4
def __init__(self, inplanes, planes, stride=1, downsample=None, baseWidth=26, scale=4, stype="normal"):
"""Constructor
Args:
inplanes: input channel dimensionality
planes: output channel dimensionality
stride: conv stride. Replaces pooling layer.
downsample: None when stride = 1
baseWidth: basic width of conv3x3
scale: number of scale.
type: 'normal': normal set. 'stage': first block of a new stage.
"""
super(Bottle2neck, self).__init__()
# todo baseWidth, width, scale的含义
width = int(math.floor(planes * (baseWidth / 64.0)))
print(f"width : {width}")
self.conv1 = nn.Conv2d(inplanes, width * scale, kernel_size=1, bias=False)
print(f"width * scale : {width * scale}")
self.bn1 = nn.BatchNorm2d(width * scale)
# nums的含义
if scale == 1:
self.nums = 1
else:
self.nums = scale - 1
# todo stype的含义
if stype == "stage":
self.pool = nn.AvgPool2d(kernel_size=3, stride=stride, padding=1)
# 这里似乎是核心改进点
convs = []
bns = []
for i in range(self.nums):
convs.append(nn.Conv2d(width, width, kernel_size=3, stride=stride, padding=1, bias=False))
bns.append(nn.BatchNorm2d(width))
self.convs = nn.ModuleList(convs)
self.bns = nn.ModuleList(bns)
print(f"convs : {len(convs)}")
self.conv3 = nn.Conv2d(width * scale, planes * self.expansion, kernel_size=1, bias=False)
self.bn3 = nn.BatchNorm2d(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stype = stype
self.scale = scale
self.width = width
print("============= init finish =============")
def forward(self, x):
residual = x
print(f"x : {x.shape}")
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
print(f"conv1 : {out.shape}")
spx = torch.split(out, self.width, 1)
for i in spx:
print(i.shape)
print(f"len(spx) : {len(spx)}")
for i in range(self.nums):
if i == 0 or self.stype == "stage":
sp = spx[i]
else:
sp = sp + spx[i]
print(f"sp : {sp.shape}")
sp = self.convs[i](sp)
sp = self.relu(self.bns[i](sp))
if i == 0:
out = sp
else:
out = torch.cat((out, sp), 1) # 相当于y2-y3-y4
if self.scale != 1 and self.stype == "normal":









