海洋生物通过快速游泳或透明伪装在非结构化的海洋环境中实现有效生存。水性软体机器人能够再现海洋生物的软体特征,与传统的刚性机器人相比,具有生物交互安全、环境适应性强、无噪音等优点。然而,开发快速且节能的水性软机器人以实现更好的水下作或探索仍然存在挑战。

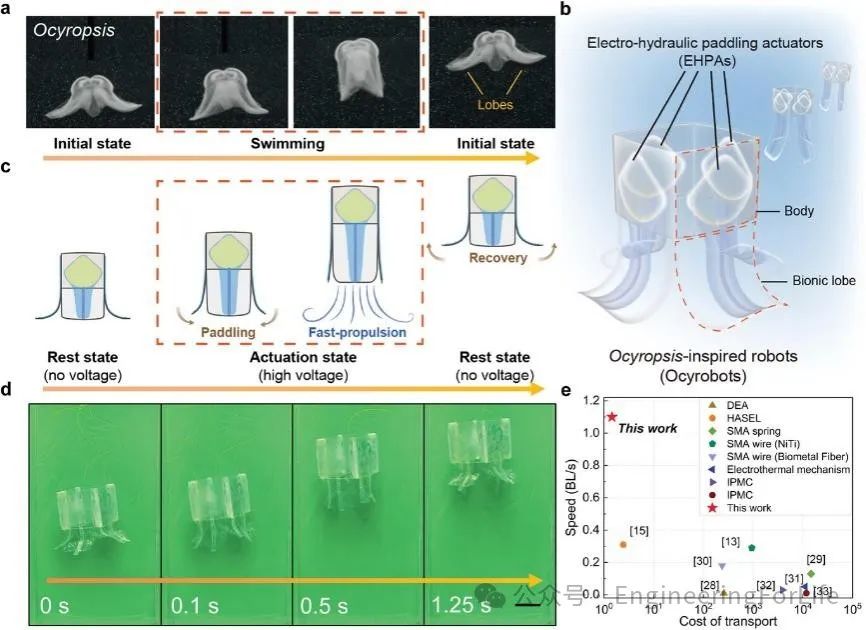
受到 Ocyropsis(一种类似水母的生物)的形态和游泳策略的启发,
浙江大学机械工程学院张超研究员/杨赓研究员
团队
通过模仿水母Ocyropsis的形态和划水机制,结合电液驱动和划水推进技术以实现高性能的水下运动。
本文要点:
(1)Ocyrobots实现了1.1体长/秒的创纪录速度,是此前同类机器人速度的三倍,同时保持了37毫瓦的低能耗。
(2)Ocyrobots还具备34°/秒的快速转向能力,能够在狭窄水下环境中灵活避障。
(3)得益于自主研发的高可靠性聚合物离子凝胶,Ocyrobots具有完全透明和高耐用性的显著优势,可延长其使用寿命并减少对水下生态系统的潜在干扰。
总体而言,该研究不仅为水下软体机器人的设计提供了新的生物模拟思路,还展示了其在水下探索和作业中的巨大潜力。
参考资料:
https://doi.org/10.1002/adfm.202421522
来源:
EngineeringForLife
声明:仅代表作者个人观点,用于研究用途,作者水平有限,如有不科学之处,请在下方留言指正!