
大家好,今天我们要来了解一项关于响应式水凝胶Aquabots的研究——《Responsive‐Hydrogel Aquabots》发表于《Advanced Science》。在当今科技发展中,制造能像生物体一样具有响应适应性的软机器人是个挑战。而Aquabots为解决这个问题带来了新的突破。它通过独特的制备方法,将响应性水凝胶集成其中,使其具备了多种优异性能,如可逆收缩、通过狭窄空间、弹性增强以及导电性能等。这些特性为其在医疗、电子等领域的应用提供了广阔前景。接下来,让我们深入了解一下吧。
*
本文只做阅读笔记分享
*
一、引言
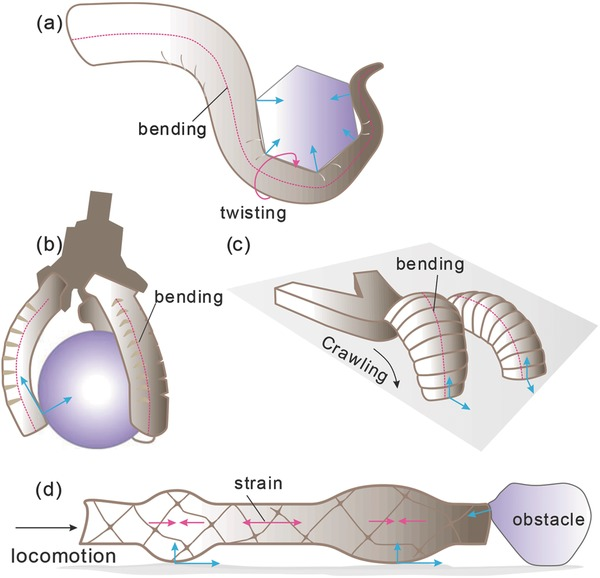
在当今科技发展中,模仿生物体响应适应性的软机器人的研发是一个重要的挑战。例如,海洋生物如章鱼能挤入狭窄空间,河豚能膨胀以抵御捕食者,这些生物的响应适应性需要传感器和执行器的集成,同时不损害实现快速变形所需的机械灵活性。然而,当前的弹性软机器人在添加传感功能时,通常需要通过多步集成过程将各个庞大的组件物理连接,这不仅导致应力集中和粘附问题,还限制了运动性和小型化。
二、响应性水凝胶的应用与挑战
交联的水胀聚合物凝胶网络,如聚(N-异丙基丙烯酰胺)(PNIPAM)水凝胶,可对温度等变化做出响应。例如,当加热到临界溶液温度(LCST)以上时,PNIPAM水凝胶会发生收缩,导致水被排出,体积减小。
近年来,响应性水凝胶已被应用于多种领域。例如,多材料响应性水凝胶已被图案化为脂质滴网络的软磁致动器,还被用于毫米级软机器人,使其具备多模态运动、光热响应和光学伪装等功能。最近,基于电响应水凝胶开发出了一种能够进行内在压阻传感和光/热驱动的软体感致动器。
然而,响应性水凝胶基软执行器或机器人存在一些挑战,它们通常是完全固化的大块结构,缺乏自然系统中典型的级联反应系统所需的微米级分隔,并且其变形能力受到底层大块流变学的限制,收缩程度受含水量的限制。
三、Aquabots的制备与性能测试
3.1制备方法
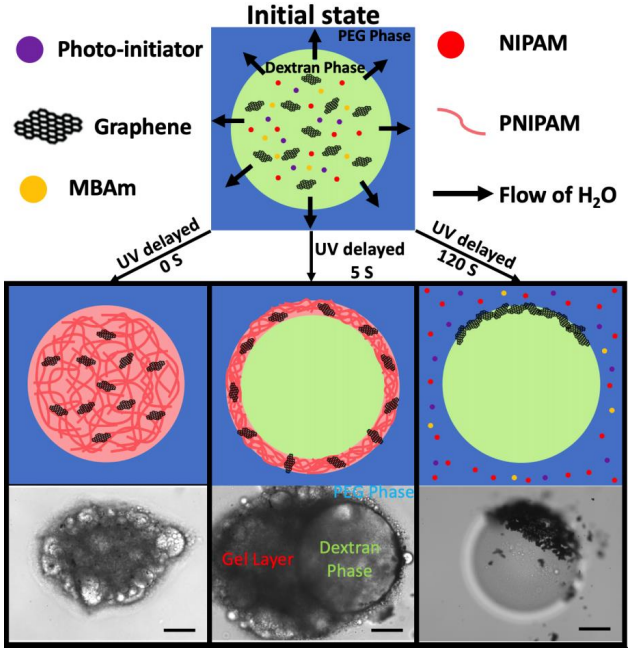
通过水相分离诱导的光聚合和全水3D打印相结合的方法,克服了传统水凝胶制备方法的挑战。在打印过程中,利用水相分离来生成Aquabots的内部分层微结构,而不是操纵光束的运动。
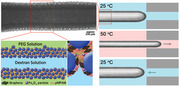
为了测试渗透对Aquabots功能化的影响,进行了如下实验:将含有10wt.%葡聚糖(Mw=10000gmol-1)和5wt.%聚乙二醇(Mw=8000gmol-1)的水溶液滴,溶解在含有石墨烯纳米片、N,N
’
-亚甲基双丙烯酰胺(MBAm)交联剂、NIPAM单体和光引发剂分子的水中,然后将该液滴放置在25wt.%聚乙二醇6(Mw=8000gmol-1)的水溶液连续相中。根据UV光照前的等待时间不同,可以观察到各种固化结构。例如,液滴形成后立即暴露于UV下,会形成完全固化的水凝胶颗粒;延迟5秒曝光,会形成壁厚随渗透运输时间而减小的胶囊;延迟120秒曝光,液滴无法固化,只观察到石墨烯纳米片聚集在界面处。
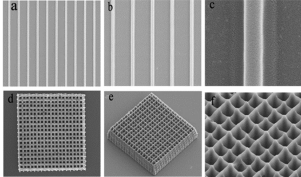
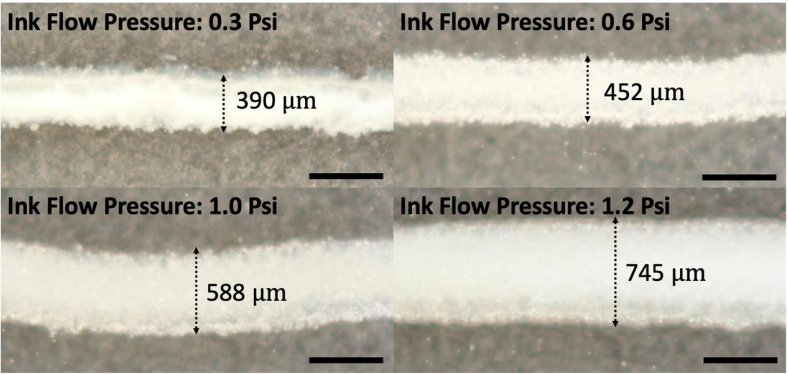
通过控制打印条件,如墨水的流速、打印喷嘴的直径和打印速度,可以轻松调整通过界面组装稳定的打印液体的直径,实现了直径小至100
μ
m的Aquabots。
3.2可逆收缩能力测试
测试了由PNIPAM制成的Aquabots在加热和冷却时的直径变化。加热时直径从376
μ
m收缩至346
μ
m(35℃,高于PNIPAM的LCST32℃),冷却时直径扩展至接近原始尺寸(25℃,低于LCST)。

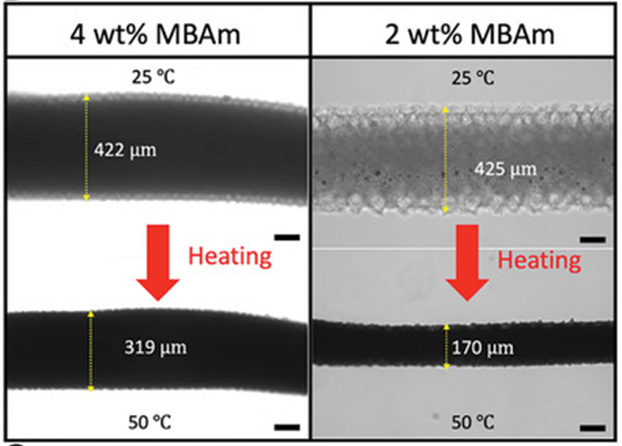
通过降低光交联程度来增强收缩程度。如图2B所示,从25℃加热至50℃,4wt.%浓度交联剂制成的Aquabots直径从422
μ
m收缩至319
μ
m(24.4%维度缩减),而2wt.%浓度交联剂制成的Aquabots直径从425
μ
m收缩至170
μ
m(60%维度缩减)。不同交联剂浓度(2和4wt.%MBAm)制备的多个Aquabots的维度收缩比,2wt.%MBAm的平均维度收缩比为53.8%,标准偏差为4.8%;4wt.%MBAm的平均维度收缩比为25.9%,标准偏差为4.9%。
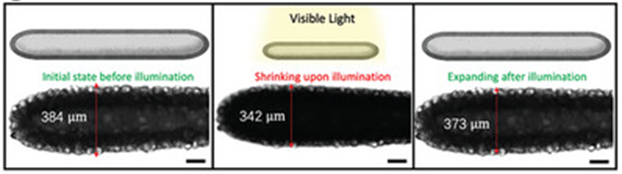
利用金纳米棒(AuNRs)和石墨烯纳米片(GNPs)作为光热材料,实现了Aquabots在室温下的可逆光热收缩。当机器人暴露于高强度可见光时,直径从384
μ
m收缩至342
μ
m(11%收缩),移除光源后,机器人恢复原始尺寸。
3.3通过狭窄空间能力测试
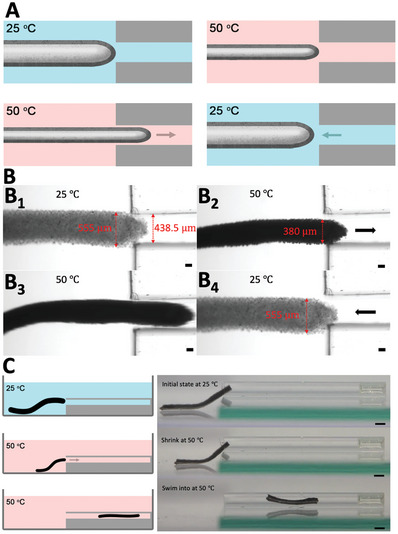
Aquabots可利用按需收缩的特性通过比其原始尺寸更窄的空间。初始直径为555
μ
m的Aquabot无法进入438.5
μ
m宽的通道,加热后直径减小至380
μ
m,在梯度磁场的作用下可顺利进入通道,并在离开通道后冷却恢复原始尺寸。进入通道后,整个按需收缩的Aquabot可以通过更窄的通道。
3.4弹性测试
基于PNIPAM水凝胶膜的Aquabots的弹性增强。通过Instron配备的敏感力传感器测量其机械性能,屈服应力可达9kPa,最大拉伸比高达1.45,杨氏模量仅为1.67kPa,表明其超柔软性。水凝胶膜的杨氏模量(1.67kPa)远小于大块水凝胶(37.24kPa),这是由于其相分离的多孔结构和较松散的聚合物网络。

3.5导电性能测试
使用导电聚合物功能化PNIPAM膜来构建电子传感器。将水溶性磺化导电聚苯胺(PANI)溶解在墨水中,将水溶性导电聚(3,4-乙烯二氧噻吩):聚(苯乙烯磺酸盐)(PEDOT:PSS)溶解在基质相中。在打印过程中,PNIPAM网络首先快速光聚合形成膜,PEDOT:PSS和磺化PANI分子由于PSS的SO
3
-
基团与PANI的质子化NH










