随着时间的推进,各个企业都在自动驾驶领域有着一套自己的思路是方法,所实现的技术路径也大相径庭,而在百度智能汽车事业部总经理顾维灏看来,无论在什么时候,用成熟、便宜的传感器才能使自动驾驶加速到来。

或许是最简单的解决方案
顾维灏认为,在不同的阶段有不同的技术水平,只有用最成熟、最便宜的传感器,才能使自动驾驶更加快速的到来。
那在现阶段百度是如何去实践这一原则的呢?可以说这种解决方案已经不能更简便了,百度采用了“摄像头+深度学习算法”的技术解决方案,在算法层面采用了英伟达的解决方案,而在整车厂则是联合了长城汽车。
这套解决方案最大的特点就是深度学习,摄像头将路况画面传输到计算电脑中,电脑根据路况对车辆的行驶路线进行调整。在CES Asia现场,百度还带来了长城的自动驾驶车辆,这辆车的自动驾驶系统正是基于上述解决方案的。

对于此次联合打造自动驾驶汽车,长城汽车股份有限公司高级副总裁胡树杰认为:“自动驾驶已经成为汽车行业转型的大趋势,国内自主品牌的汽车厂商在自动驾驶技术的变革浪潮中要抢占先机。”同时他透露,双方合作的成果也将在2020年之后的长城汽车上应用。
这是一个在现阶段依靠摄像头的最初级的自动驾驶,虽然成本很低,在达到了可以大面积普及的阶段,但还是有着自身的局限性,只有一个摄像头作为传感单元,其可靠性并不高。
从应用场景来看,这种自动驾驶的解决方案只适用于白天、阳光明媚、无风的天气下,在通勤道路上应用。一个塑料袋、一个阴天、一个光线不好,都会影响到该解决方案的工作。
但百度还是带来了一些在研发层面的干货以及一个行业解决方案。
两大亮点技术成果
本届CES Asia可以看成是百度智能驾驶整体发展成果的一个展示窗口。顾维灏在演讲中详解了百度在自动驾驶领域的两大亮点成果——端到端高级自动驾驶模型 Road Hackers, 以及国内首个可量产的自动驾驶计算平台BCU(Baidu Computing Unit)。
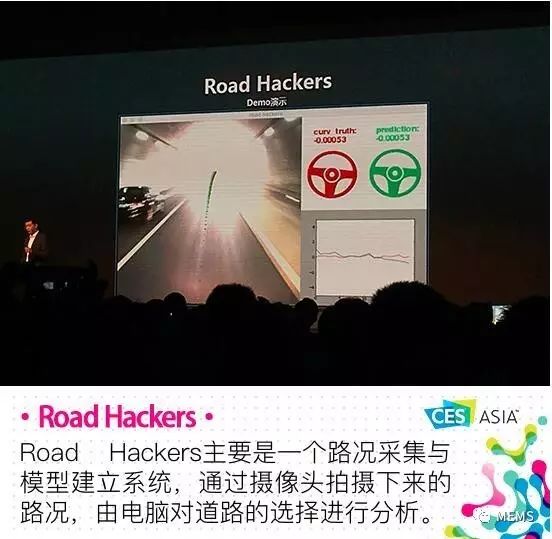
Road Hackers主要是一个路况采集与模型建立系统,通过摄像头拍摄下来的路况,由电脑对道路的选择进行分析,如下图所示,红颜色为司机真实操作方向盘的角度以及转弯角度,而绿色则是电脑通过摄像头的拍摄分析出来的角度,可以看出还是存在一定的误差。
顾维灏表示,实现真实的自动驾驶必须要到实路中测试,理想情况下需要2亿英里。通过大量的数据积累以后,这一模型能够在准确度上得到大量的提升,而对于百度来说,数据的积累无疑是其优势之一。
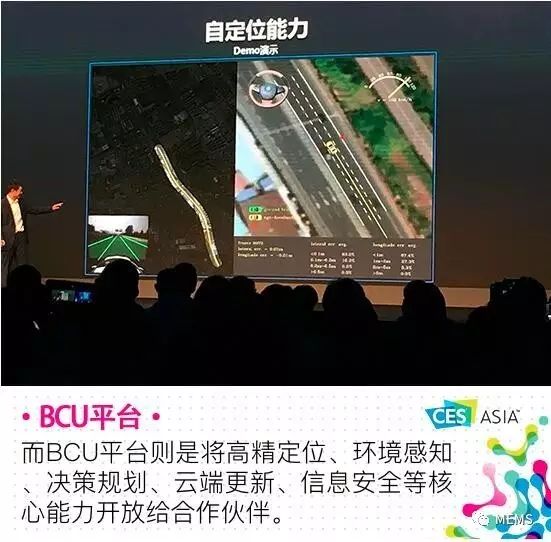
而BCU平台则是将高精定位、环境感知、决策规划、云端更新、信息安全等核心能力开放给合作伙伴。
这都是百度宣布的Apollo计划自动驾驶方面的规划之一,百度正在积极扩展其智能驾驶“朋友圈”,希望通过搭建一个以合作为中心的开放体系,加速智能驾驶技术的市场化落地。就在前不久,百度与大陆集团、博世集团在德国签署合作协议,将在自动驾驶、车联网和智能交通领域就技术发展和商业应用方面展开全方位的战略合作。在一周之后的CES Asia上,百度再度向业界伸出“橄榄枝”,召开“创领智途 共驱未来”合作伙伴发布会,与德赛西威、联合电子、航盛电子、博泰电子共4家知名tier1厂商达成合作伙伴关系。
据顾维灏介绍,有能力的人下载这些框架层,就可以制造出自动驾驶汽车了。“通过Apollo计划,可以系统化地降低行业门槛,使得每一个生态系统参与者都有机会参与到基于Apollo计划的一个新的、快速迭代、快速创新的生态环境中。”顾维灏说。

结语
自动驾驶的研发已经逐渐“抱团化”,百度也在积极的打造自己的“朋友圈”,开放的态度固然重要,但在具体的落地解决方案上,恐怕还需要更多的研发来支持。
延伸阅读:
《自动驾驶汽车中的传感器和数据管理》
《汽车成像技术-2016版》
《LeddarTech固态激光雷达(LiDAR)模组:LeddarVu》
《博世77GHz远距离雷达传感器:LRR4》
《奥托立夫77GHz多模雷达》
《德尔福车尾和侧面检测系统:盲点雷达》
《英飞凌76 GHz雷达接收器和发射器:RRN7740和RTN7750》
《Delphi RACam:集成雷达和摄像头》
《博世中程雷达(MRR)传感器》
《大陆集团77GHz雷达:ARS4-A》
《恩智浦MR2001多通道77GHz雷达Rx/Tx/VCO扇出RCP芯片组》






