神经网络也许是计算机计算的将来,一个了解它的好方法是用一个它可以解决的难题来说明。假设给出
500
个字符的代码段,您知道它们是C,C++,JAVA或Python。
现在构造一个程序,来识别编写这段代码的语言。一种解决方案是构造一个能够学习识别这些语言的神经网络。
这篇分享就讨论了神经网络的基本功能以及构造神经网络的方法,这样就可以在编码时应用它们了。
根据一个简化的统计,人脑由百亿条神经组成
,
每条神经平均连结到其它几千条神经。通过这种连结方式,神经可以收发不同数量的能量。神经的一个非常重要的功能是它们对能量的接受并不是立即作出响应,而是将它们累加起来,当这个累加的总和达到某个临界阈值时,它们将它们自己的那部分能量发送给其它的神经。大脑通过调节这些连结的数目和强度进行学习。尽管这是个生物行为的简化描述。但同样可以充分有力地被看作是神经网络的模型。
阈值逻辑单元(
Threshold Logic Unit
,
TLU
)
理解神经网络的第一步是从对抽象生物神经开始,并把重点放在阈值逻辑单元(
TLU
)这一特征上。一个TLU
是一个对象,它可以输入一组加权系数的量,对它们进行求和,如果这个和达到或者超过了某个阈值,输出一个量。让我们用符号标注这些功能。
首先,有输入值以及它们的权系数:
X1, X2, ..., Xn
和
W1, W2, ..., Wn
。接着是求和计算出的
Xi*Wi
,产生了激发层
a
,换一种方法表示:
a = (X1 * W1)+(X2 * W2)+...+(Xi * Wi)+...+ (Xn * Wn)
阈值称为
theta
。最后,输出结果
y
。当
a >=theta
时
y=1
,反之
y=0
。请注意输出可以是连续的,因为它也可以由一个
squash
函数
s
(或
sigma
)判定,该函数的自变量是
a
,函数值在
0
和
1
之间,
y=s(a)
。
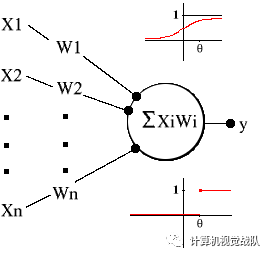
图
1.
阈值逻辑单元,带有
sigma
函数(顶部)和
cutoff
函数(底部)
TLU
会分类,假设一个
TLU
有两个输入值,它们的权系数等于
1
,
theta
值等于
1.5
。当这个
TLU
输入
<0,0>
、
<0,1>
、
<1,0>
和
<1,1>
时,它的输出分别为0、0、0、1。
TLU
将这些输入分为两组:
0
组和
1
组。就像懂得逻辑连接(布尔运算
AND
)的人脑可以类似地将逻辑连接的句子分类那样,
TLU
也懂得一点逻辑连接之类的东西。
TLU
能够用几何学上的解释来阐明这种现象。它的四种可能输入对应于笛卡尔图的四个点。从等式
X1*W1 + X2*W2 = theta
,换句话说,也即
TLU
转换其分类行为的点开始,它的点都分布在曲线
X2 = -X1 + 1.5
上。这个方程的曲线将
4
个可能的输入分成了两个对应于
TLU
分类的区域。这是
TLU
原理中更为普通的实例。在
TLU
有任意数目的
N
个输入的情况下,一组可能的输入对应于
N
维空间中的一个点集。如果这些点可以被超平面
———
换句话说,对应于上面示例中的线的
N
维的几何外形切割,那么就有一组权系数和一个阈值来定义其分类刚好与这个切割相匹配的
TLU
。
TLU
的学习原理
既然
TLU
懂得分类,它们就知道素材。神经网络也可假定为可以学习。它们的学习机制是模仿大脑调节神经连结的原理。
TLU
通过改变它的权系数和阈值来学习。实际上,从数学的观点看,权系数阈值的特征有点武断。让我们回想一下当
SUM(Xi * Wi) >= theta
时
TLU
在临界点时输出的是
1
而不是
0
,这相当于说临界点是出现在
SUM(Xi * Wi)+ (-1 * theta) >= 0
的时候。所以,我们可以把
-1
看成一个常量输入,它的权系数
theta
在学习(或者用技术术语,称为培训)的过程中进行调整。这样,当
SUM(Xi * Wi)+ (-1 * theta) >= 0
时,
y=1
,反之
y=0
。
在训练过程中,神经网络输入:一系列需要分类的术语示例 ;它们的正确分类或者目标 。这样的输入可以看成一个向量:
,这里
t
是一个目标或者正确分类。神经网络用这些来调整权系数,其目的使培训中的目标与其分类相匹配。更确切地说,这是有指导的培训,与之相反的是无指导的培训。前者是基于带目标的示例,而后者却只是建立在统计分析的基础上(请参阅本文随后的参考资料)。权系数的调整有一个学习规则,一个理想化的学习算法如下所示:
清单
1.
理想化的学习算法
fully_trained = FALSE
DO UNTIL (fully_trained):
fully_trained = TRUE
FOR EACH training_vector =
::
# Weights compared to theta
a = (X1 * W1)+(X2 * W2)+...+(Xn * Wn) - theta
y = sigma(a)
IF y != target:
fully_trained = FALSE
FOR EACH Wi:
MODIFY_WEIGHT(Wi) # According to the training rule
IF (fully_trained):
BREAK
您或许想知道,
“
哪些培训规则?
”
有很多,不过有一条似乎合理的规则是基于这样一种思想,即权系数和阈值的调整应该由分式
(t - y)
确定。这个规则通过引入
alpha (0
完成。我们把
alpha
称为学习率。
Wi
中的更改值等于
(alpha * (t - y)* Xi)
。当
alpha
趋向于
0
时,神经网络的权系数的调整变得保守一点;当
alpha
趋向于
1
时,权系数的调整变得激进。一个使用这个规则的神经网络称为感知器,并且这个规则被称为 感知器学习规则。
Rosenblatt
于
1962
年(请参阅参考资料)下的结论是,如果
N
维空间的点集被超平面切割,那么感知器的培训算法的应用将会最终导致权系数的分配,从而定义了一个
TLU
,它的超平面会进行需要的分割。当然,为了记起
Keynes
,最终我们都切断了与外界的联系,专心思考。但是在计算时间之外,我们仍濒临危险,因为我们需要自己的神经网络对可能输入的空间进行不止一次的切割。
文章开始的难题举例说明了这个,假设给您
N
个字符的代码段,您知道是
C
、
C++
、
Java
或者
Python
。难的是构造一个程序来标识编写这段代码的语言。用
TLU
来实现需要对可能的输入空间进行不止一次的分割。它需要把空间分成四个区域。每种语言一个区域。把神经网络培训成能实现两个切割就可完成这种工作。
第一个切割将
C/C++
和
Java/Python
分开来,另一个将
C/Java
和
C++/Python
分开。一个能够完成这些切割的网络同样可以识别源代码样本中的语言。但是这需要网络有不同结构,在描述这个不同之处之前,先来简单地看一下实践方面的考虑。
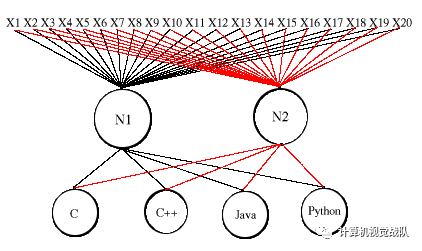
图
2.
初步的(不完整的)感知器学习模型
考虑到排除取得
N
个字符代码所需的计算时间,统计从
ASCII
码的32到127的
范围内可视
ASCII
码字符出现的频率,并在这个统计以及关于代码语言的目标信息的基础上培训神经网络。
我们的方法是将字符统计限制到
C
、
C++
、
Java
和
Python
代码字符库中最常用的
20
个非字母数字字符。由于关注浮点运算的执行,我们打算用一种规格化因素将这
20
字符统计分开来,并以此培训我们的网络。显然,一个结构上的不同是我们的网络有
20
个输入节点,但这是很正常的,因为我们的描述已经暗示了这种可能性。一个更有意思的区别是出现了一对中间节点,
N1
和
N2
,以及输出节点数量从两个变成了四个(
O1
到
O4
)。
我们将训练
N1
,当它一看到
C
或
C++
,设置
y1=1
,看到Java或Python,
它将设置
y1=0
。同理训练
N2
,当它看到
C
或
Java
,设置
y2=1
,看到
C++
或
Python
,设置
y2=0
。此外,
N1
和
N2
将输出
1
或
0
给
Oi
。现在如果
N1
看到
C
或
C++
,而且
N2
看到
C
或者
Java
,那么难题中的代码是
C
。而如果
N1
看到
C
或
C++
,
N2
看到
C++
或
Python
,那么代码就是
C++
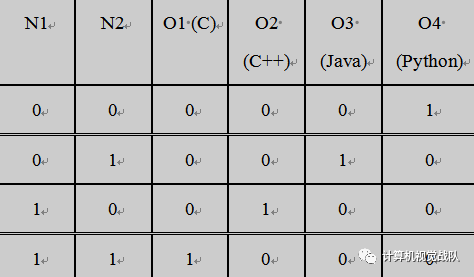
。这个模式很显而易见。所以假设
Oi
已被培训并根据下面表格的情况输出
1
或
0
。
映射到输出(作为布尔函数)的中间节点。
如果这样可行的话,我们的网络就可以从代码示例中识别出语言了。这个想法很好。但是在实践上却有些难以置信。不过这种解决方案预示了
C/C++
和
Java/Python
输入被一个超平面切割了,同样
C/Java
和
C++/Python
输入被另一个切割。这是一个网络培训的解决方案,迂回地解决了这个输入空间的设想。
关于
delta
规则
另一种训练的规则叫做
delta
规则。感知器培训规则是基于这样一种思路
——
权系数的调整是由目标和输出的差分方程表达式决定。而
delta
规则是基于梯度降落这样一种思路。这个复杂的数学概念可以举个简单的例子来表示。从给定的几点来看,向南的那条路径比向东那条更陡些。向东就像从悬崖上掉下来,但是向南就是沿着一个略微倾斜的斜坡下来,向西像登一座陡峭的山,而北边则到了平地,只要慢慢的闲逛就可以了。所以您要寻找的是到达平地的所有路径中将陡峭的总和减少到最小的路径。在权系数的调整中,神经网络将会找到一种将误差减少到最小的权系数的分配方式。
将我们的网络限制为没有隐藏节点,但是可能会有不止一个的输出节点,设
p
是一组培训中的一个元素,
t(p,n)
是相应的输出节点
n
的目标。但是,设
y(p,n)
由以上提到的
squash
函数
s
决定,这里
a(p,n)
是与
p
相关的
n
的激活函数,或者用
(p,n) = s( a(p,n) )
表示为与
p
相关的节点
n
的
squash
过的激活函数。为网络设定权系数(每个
Wi
),也为每个
p
和
n
建立
t(p,n)
与
y(p,n)
的差分,这就意味着为每个
p
设定了网络全部的误差。因此对于每组权系数来说有一个平均误差。但是
delta
规则取决于求平均值方法的精确度以及误差。我们先不讨论细节问题,只是说一些与某些
p
和
n
相关的误差:
?* square( t(p,n) - y(p,n) )
(请参阅参考资料)。现在,对于每个
Wi
,平均误差定义如下:
清单
2.
查找平均误差
sum = 0
FOR p = 1 TO M: # M is number of training vectors
FOR n = 1 TO N: # N is number of output nodes
sum = sum + (1/2 * (t(p,n)-y(p,n))^2)
average = 1/M * sum
delta
规则就是依据这个误差的定义来定义的。因为误差是依据那些培训向量来说明的,
delta
规则是一种获取一个特殊的权系数集以及一个特殊的向量的算法。而改变权系数将会使神经网络的误差最小化。
我们不需要讨论支持这个算法的微积分学,只要认为任何
Wi
发生的变化都是如下所示就够了:
alpha * s'(a(p,n)) * (t(p,n) - y(p,n)) * X(p,i,n).
X(p,i,n)
是输入到节点
n
的
p
中的第
i
个元素,
alpha
是已知的学习率。最后
s'( a(p,n) )
是与
p
相关的第
n
个节点激活的
squashing
函数的变化(派生)率,这就是
delta
规则,并且
Widrow
和
Stearns
向我们展示了当
alpha
非常小的时候,权系数向量接近某个将误差最小化的向量。用于权系数调节的基于
delta
规则的算法就是如此。
梯度降落(直到误差小到适当的程度为止)
step 1: for each training vector, p, find a(p)
step 2: for each i, change Wi by:
alpha * s'(a(p,n)) * (t(p,n)-y(p,n)) * X(p,i,n)
这里有一些与感知器算法相区别的重要不同点。显然,在权系数调整的公式下有着完全不同的分析。
delta
规则算法总是在权系数上调整,而且这是建立在相对输出的激活方式上。最后,这不一定适用于存在隐藏节点的网络。
反向传播
反向传播这一算法把支持
delta
规则的分析扩展到了带有隐藏节点的神经网络。为了理解这个问题,设想
Bob
给
Alice
讲了一个故事,然后
Alice
又讲给了
Ted
,
Ted
检查了这个事实真相,发现这个故事是错误的。现在
Ted
需要找出哪些错误是
Bob
造成的而哪些又归咎于
Alice
。当输出节点从隐藏节点获得输入,网络发现出现了误差,权系数的调整需要一个算法来找出整个误差是由多少不同的节点造成的,网络需要问,
“
是谁让我误入歧途?到怎样的程度?如何弥补?
”
这时,网络该怎么做呢?
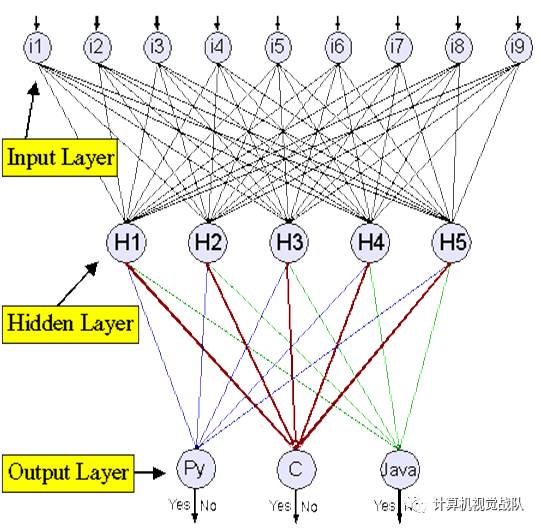
图
3
:
“
代码识别
”
反向传播的神经网络
反向传播算法同样来源于梯度降落原理,在权系数调整分析中的唯一不同是涉及到
t(p,n)
与
y(p,n)
的差分。通常来说
Wi
的改变在于:
alpha * s'(a(p,n)) * d(n) * X(p,i,n)
其中
d(n)
是隐藏节点
n
的函数,让我们来看(
1
)
n
对任何给出的输出节点有多大影响;(
2
)输出节点本身对网络整体的误差有多少影响。一方面,
n
影响一个输出节点越多,
n
造成网络整体的误差也越多。另一方面,如果输出节点影响网络整体的误差越少,
n
对输出节点的影响也相应减少。这里
d(j)
是对网络的整体误差的基值,
W(n,j)
是
n
对
j
造成的影响,
d(j) * W(n,j)
是这两种影响的总和。但是
n
几乎总是影响多个输出节点,也许会影响每一个输出结点,这样,
d(n)
可以表示为:
SUM(d(j)*W(n,j))
这里
j
是一个从
n
获得输入的输出节点,联系起来,我们就得到了一个训练规则,第
1
部分:在隐藏节点
n
和输出节点
j
之间权系数改变,如下所示:
alpha * s'(a(p,n))*(t(p,n) - y(p,n)) * X(p,n,j)
第
2
部分:在输入节点
i
和输出节点
n
之间权系数改变,如下所示:
alpha * s'(a(p,n)) * sum(d(j) * W(n,j)) * X(p,i,n)
这里每个从
n
接收输入的输出节点
j
都不同。关于反向传播算法的基本情况大致如此。
将
Wi
初始化为小的随机值。
使误差小到适当的程度要遵循的步骤。
第
1
步:输入培训向量。
第
2
步:隐藏节点计算它们的输出
第
3
步:输出节点在第
2
步的基础上计算它们的输出。
第
4
步:计算第
3
步所得的结果和期望值之间的差。
第
5
步:把第
4
步的结果填入培训规则的第
1
部分。
第
6
步:对于每个隐藏节点
n
,计算
d(n)
。
第
7
步:把第
6
步的结果填入培训规则的第
2
部分。
通常把第
1
步到第
3
步称为正向传播,把第
4
步到第
7
步称为反向传播。反向传播的名字由此而来。
识别成功
在掌握了反向传播算法后,可以来看我们的识别源代码样本语言的难题。为了解决这个问题,我们提供了
Neil Schemenauer
的
Python
模型
bpnn
(请参阅参考资料)。用它的模型解决问题真是难以置信的简单,在我们的类
NN2
里定制了一个类
NN
,不过我们的改变只是调整了表达方式和整个过程的输出,并没有涉及到算法。基本的代码如下所示:
清单
3
:用
bpnn.py
建立一个神经网络
# Create the network (number of input, hidden, and training nodes)
net = NN2(INPUTS, HIDDEN, OUTPUTS)
# create the training and testing data
trainpat = []
testpat = []
for n in xrange(TRAINSIZE+TESTSIZE):
#... add vectors to each set
# train it with some patterns
net.train(trainpat, iterations=ITERATIONS, N=LEARNRATE, M=MOMENTUM)
# test it
net.test(testpat)










