各位泡芙们,大家好!
这里我们隆重地介绍可能是关于视觉SLAM的第一本系统性的中文书。由泡泡机器人成员:清华大学的高翔博士及其导师,华中科技大学的刘毅博士,鲁汶大学的颜沁睿,历经一年时间编写而成的精品书籍!
在公众号上一篇文章中,我们统计出了获奖的几位泡泡机器人的粉丝,并且承诺免费赠送高博的新书《视觉SLAM十四讲:从理论到实践》。今天,经过小编和高翔博士商量,决定再举办一次有奖活动,给大家更加振奋人心的奖品!
高翔博士亲笔签名的《视觉SLAM十四讲:从理论到实践》!!!
亲笔签名!!!
签名!!!
推荐【泡泡机器人SLAM】给群(QQ群,微信群)。我们将选出得分最高的三个粉丝,每人奖励高翔博士的亲笔签名的《视觉SLAM十四讲:从理论到实践》一本!!!
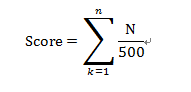
其中,N为QQ群,或微信群的群成员人数,
n为推荐的QQ群 + 微信群的个数。
1. 将你推荐【泡泡机器人SLAM】(二维码或者公众号文章链接)到QQ群,或微信群的截图发至微信公众号后台。
2. 将你发送了几个群,每个人人数分别是多少,发消息至公众号后台。
(时间截止至2017.04.22晚22:00)
这是一本介绍视觉SLAM的书,也很可能是第一本以视觉SLAM为主题的中文书。 那么,SLAM是什么呢? SLAM是Simultaneous Localization and Mapping的缩写,中文译作“同时定位与地图构建”。它是指搭载特定传感器的主体,在没有环境先验信息的情况下,于运动过程中建立环境的模型,同时估计自己的运动。如果这里的传感器主要为相机,那就称为“视觉SLAM”。
本书的主题就是视觉SLAM。这里我们刻意把许多个定义放到一句话中,是希望读者有一个较明确的概念。首先,SLAM的目的是解决“定位”与“地图构建”这两个问题。也就是说,一边要估计传感器自身的位置,一边要建立周围环境的模型。
从写作风格上,我们不想把本书写成枯燥的理论书籍。技术类图书应该是严谨可靠的,但严谨不意味着刻板。一本优秀的技术书应该是生动有趣而易于理解的。如果你觉得“这个作者怎么这么不正经”,敬请原谅,因为我并不是一个非常严肃的人啊。无论如何,有一件事是可以肯定的:只要你对这门新技术感兴趣,在学习本书的过程中肯定会有所收获!您会掌握与SLAM相关的理论知识,你的编程能力也将有明显的进步。 在很多时候,您会有一种“我在陪你一起做科研”的感觉,这正是我所希望的。但愿您能在此过程中发现研究的乐趣,喜欢这种“通过一番努力,看到事情顺利运行”的成就感。 好了,话不多说,祝你旅行愉快!
最后,如果没有获得奖品的话,大家可以在京东上搜索:《视觉SLAM十四讲:从理论到实践》,即可下单购买哦。
图片版权:半闲居士
长按下图,识别图中二维码,关注“泡泡机器人SLAM”(ID:paopaorobot_slam)公众号。即可给【泡泡机器人SLAM】微信公众号发消息。
【版权声明】泡泡机器人SLAM的所有文章全部由泡泡机器人的成员花费大量心血制作而成的原创内容,希望大家珍惜我们的劳动成果,转载请务必注明出自【泡泡机器人SLAM】微信公众号,否则侵权必究!同时,我们也欢迎各位转载到自己的朋友圈,让更多的人能进入到SLAM这个领域中,让我们共同为推进中国的SLAM事业而努力!
【注】商业转载请联系刘富强([email protected])进行授权。普通个人转载,请保留版权声明,并且在文章下方放上“泡泡机器人SLAM”微信公众账号的二维码即可。
【编辑】丸子QI





