正文
2017年7月的一天,李彦宏为了拍摄百度无人车的演示视频,在北京五环上吃了一张罚单。
那个时候,没人会想到,三年后,北京已经开始试点无人出租车的商业化运营,中国有数十个城市正在试点各大厂商主导的Robotaxi,落地运营似乎指日可待。

业内有一个说法,说2020年是
自动驾驶
的最后一
个机会
。
在这一年的末尾,特斯拉发布了FSD(完全自动驾驶系统)的限量测试版,宣称今年完成L5级别基本功能;谷
歌的Waymo也已经取消了自家RoboTaxi中的安全员,直接实现了无人出租车上路运营。
全球自动驾驶领域的商业化进程都在向前飞速推进,而
国内造车新势力如蔚来、小鹏、理想们,也在谈及自家自动驾驶解决方案的时候,像当年的华为、小米、OV们一样,在发布会上频频提起了“友商”特斯拉。
我们今天要讲的,就是自动驾驶的故事。在这个故事里,特斯拉,谷歌,与中国造车新势力们都是主角。
关于自动驾驶的元年有很多种说法,但如果让我来讲这个故事,我会把第一个定格交给2004年。
这一年汽车界发生了两件大事,一件是马斯克在2月给几乎走投无路的特斯拉投了一笔640万美元的A轮融资,成为了特斯拉最大的股东和董事长;另一件是五角大楼领导的绝密军事机构DARPA(美国国防高级研究计划局),在莫哈维沙漠开启了后来延续三届的DARPA Grand Challenge无人驾驶汽车大赛。
我总在写到DARPA的时候,下意识地抬眼看一看手机右上角那个亮着的定位图标,这个隶属于美国国防部的科研机构,是很多“黑科技”的最早源头,其中就包括我们现在人人都在使用的GPS全球定位系统。
2001年美国入侵阿富汗,死伤数字急剧上升的阶段,美国国会一度对DARPA提出,希望能在2015年,让军方三分之一的车辆实现无人驾驶。但直到2003年伊拉克战争爆发,DARPA的无人驾驶项目依然没有显著进展。
造不出来车怎么办?DARPA办了个比赛。
2004年、2005年、2007年
DARPA
举办了三届无人汽车大奖赛DARPA Grand Challenge。
前两届的赛事选址都落在和伊拉克战争地形相似的莫哈维沙漠,奖金100万美元;
第三届叫“城市挑战赛”,在美国乔治空军基地举行,除了沙漠路段还增添了城市路段,奖金也加到了200万美元。
第一届大赛,
要求参赛团队的汽车在十小时内完全自动行驶228公里,走的最远的团队,也没能走完全程的5%。
第二届大赛,团队们果断汲取了教训,将技术路线从硬件改装,转向了软件算法驱动。他们给汽车装上了激光雷达等一系列传感器,对外部环境进行感知建模,然后通过算法实现自动驾驶决策。
这一次大量团队跑完了全程,决定胜负的关键,是斯坦福AI实验室团队在传感器阵列中加入了一组摄像头。计算机视觉第一次被应用在了自动驾驶系统中。
第三届大赛,各大团队都学聪明了。他们在车上加上了激光雷达、超声波雷达、摄像头等各种各样能用上的传感器,最终斯坦福AI实验室的车辆最快冲线,但卡内基梅隆大学的团队则明显更加稳定,冠军给了后者。
DARPA用了三场大赛的时间,把自动驾驶技术的落地推进了数十年,奠定了
现今所有自动驾驶系统的基础架构:感应层,决策层,执行层。
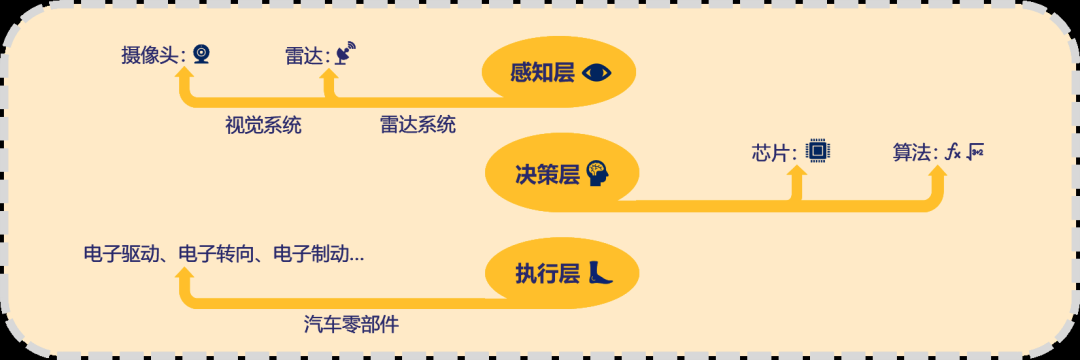
简单来说,
感知
层=眼睛,决策层=大脑,执行层=四肢
。
感知层主要是各类外部传感器组成
,
包括激光雷达,超声波雷达,高清摄像头等,用以对周围环境感知、建模。
决策层主要由硬件+软件算法组成
,处理、理解传感器所获取的环境数据,决定如何处理目前路况。
执行层则主要由各级电动、电控系统组成
,负责实现命令动作。
第二届大赛中,引入计算机视觉(摄像头)的传感器方案,和激光雷达为主导的传感器方案,贯穿了此后十年自动驾驶行业的发展历程,
二个技术方案的支持方代表,分别是
特斯拉和谷歌Waymo,
二者谁是更优解,
至今仍未有所定论。
而分别在两届大赛中胜出的斯坦福与卡内基梅隆大学,成为了美国无人驾驶行业的黄埔军校。
全程观战了三届DARPA Grand Challenge赛事的谷歌创始人拉里·佩奇,把第二届冠军塞巴斯特安·特伦,和第三届冠军克里斯·厄姆森,都挖到了谷歌。
2009年特伦带着四个研究员,从谷歌X实验室里孵化出了
谷歌的无人驾驶项目。
这个项目就是后来的自动驾驶业界第一,
Waymo。
2013年的5月,特斯拉成立的第十个年头,马斯克发了一条推特:“自动驾驶用在飞机上是好事,我们应该也把它放到车里。”
这是特斯拉第一次公开提到自家的自动辅助驾驶系统Autopilot,此时距离蔚来和小鹏汽车在中国成立还有大约一年的时间,距离业界公认的中国自动驾驶元年还有两年,但距离谷歌成立无人驾驶事业部已经过去了整整四年。
时间来到了2014年,十年前遇到马斯克的特斯拉正式站上舞台,成为了自动驾驶领域新的主角。
2014年10月,特斯拉完成了基于Model S的第一版硬件支持方案的设计,正式对外宣布,所有新出厂的车辆都会默认搭载特斯拉自动驾驶系统Autopilot的系列硬件。
这套硬件叫HW1.0(Hardware 1),
包含了
2个摄像头(1个前置1个后置),12个超声波雷达,1个毫米波雷达,加上一个主控芯片NVIDIA Tegra 3,和一个视觉处理芯片Mobileye EyeQ3。
2015年10月14日,硬件正式预装1年后,特斯拉推送了整车7.0版本的系统升级,许多特斯拉车主睡了一觉起来,发现自己的Model S突然有了部分自动驾驶功能,比如高速上可以自动保持车道,并根据前方车流加减速;打一下转向灯,就可以完成自动变道等等。
这一天,Autopilot系统正式问世。《麻省理工科技评论》将其评为了“2016年十大突破性技术”。
从组建团队开发,到系统正式在量产车内置上线,特斯拉一共只用了两年。这两年是无人驾驶行业风起云涌的两年。
Uber的创始人卡兰尼克为了做自动驾驶,一次性从卡内基梅隆大学挖了40多个人工智能和机器人专家;大洋彼岸的中国,造车新势力如雨后春笋一般冒了出来,蔚来、小鹏、理想、威马、零跑相继成立;
百度在乌镇世界互联网大会之前宣布成立无人驾驶事业部;
而从百度离职后加入滴滴当CTO的张博,在硅谷遇到了谷歌无人车项目的创始人塞巴斯特安·特伦,回国就在
滴滴成立了一个无人驾驶部门。
一向以快著称的特斯拉,在推进
Autopilot时极为激进,一直把“自动驾驶”作为宣传点。但也因随之而来的事故,而招致了大量质疑。
2016年7月26日,在多起事故的压力之下,
特斯拉和HW1.0的芯片供应商
Mobileye共同
宣布双方停止合作。
2016年10月19日,马斯克宣布,所有特斯拉新车将标配升级版硬件系统HW2.0。
这套硬件包括:8个摄像头(3个前置2个侧边3个后置),12个超声波雷达,1个毫米波雷达。
除了大量增加了感应摄像头,其中最大的变化,就是抛弃Mobileye,将处理芯片换成了英伟达旗下的NVIDIA Drive PX2。
特斯拉声称这款芯片比上一代的运算速度快了40倍,运行的是特斯拉自研的神经网络,最终将通过升级,实现完全自动驾驶功能。
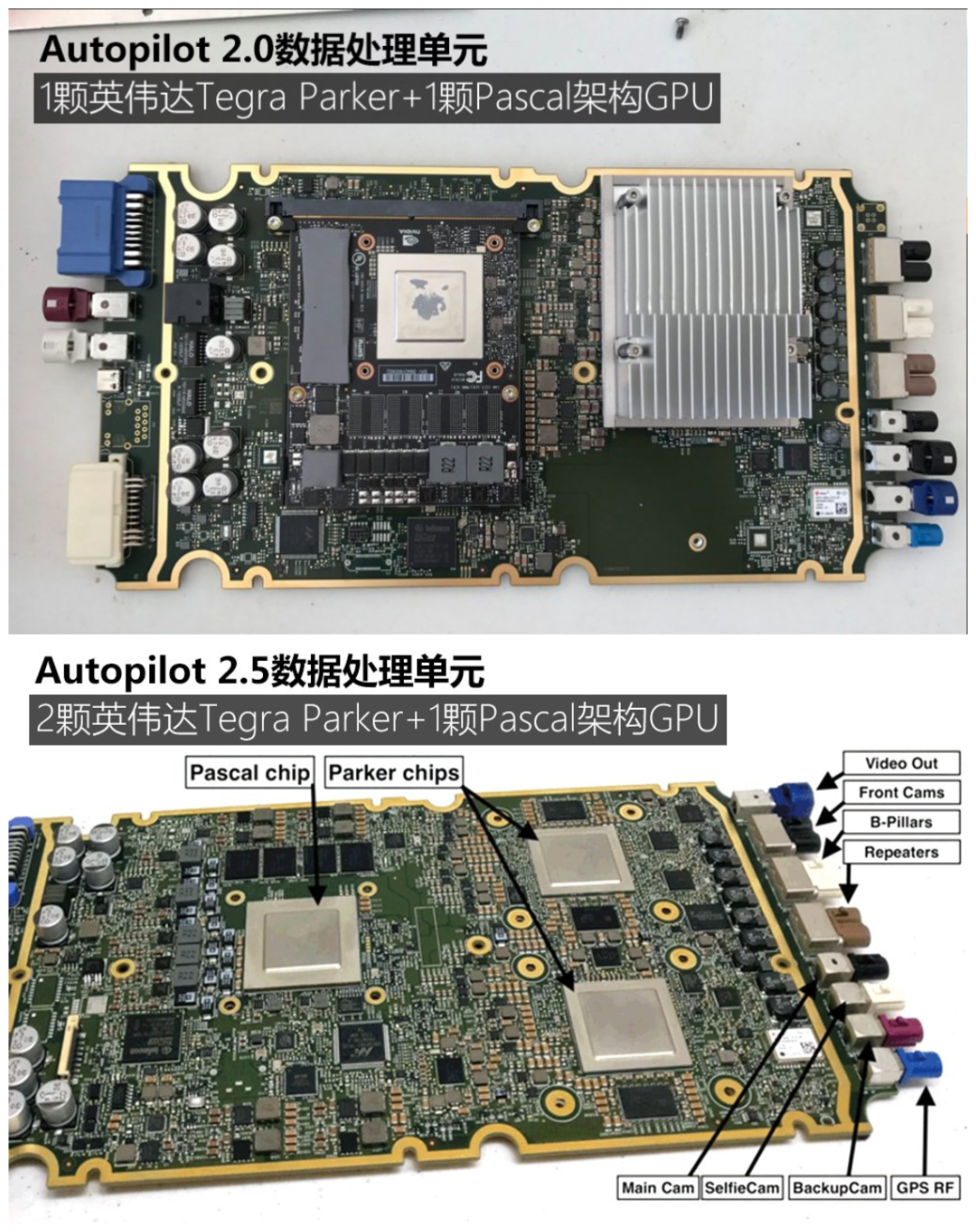
这是一次典型的危机公关,在后来的芯片拆解中,我们可以看到,HW2.0的芯片上有大片留白,集成度显然不足。而且为了平衡成本,
PX2
也用的是打了折扣的“
丐版
”
。
后来特斯拉对这套系统平台做过一次升
级,升级后的版本被称为HW2.5。
但即便如此,这也不是三个月就能完成的工作,特斯拉更换处理芯片其实早有预兆。早在2016年1月,一切还没有发生的时候,特斯拉就从AMD请来了号称“芯片之神”的
吉姆·凯勒,从0开始组建自己的芯片研发团队
。
吉姆·凯勒
早年任职于AMD,曾经深度参与了x86-64架构的定制工作,如今所有64位PC系统,都建立在个架构的基础之上。接着他又主导研发了AMD K7、K8两代架构,使得CPU市场进入了短暂的AMD速龙正面抗衡甚至压制英特尔奔腾的时代。
完成AMD K8架构之后,吉姆·凯勒离职进入半导体设计公司P.Asemi。这家公司在2008年被苹果收购,他随之进入苹果,又主导设计出了苹果经典的A4、A5芯片。
四年后,被英特尔i3打得毫无还手之力的AMD,把吉姆重新请了回来。芯片之神花了三年,帮AMD设计出了新的处理器架构Zen,在这个架构上研发出的AMD锐龙,让AMD重返巅峰
,再次和英特尔平分秋色,甚至逼迫英特尔不得不对自家处理器性能做了大幅提升。
2015年末,吉姆·凯勒第二次离开AMD。
2016年1月,他带着一整套的芯片研发团队来到了特斯拉,成立了特斯拉自己的芯片研发团队:Tesla Vision。
三年后,
2019年4月23日,特斯拉发布了新一代自动驾驶硬件
,这套硬件的传感器配置依旧沿用了HW2.0版本,基本没有做出变化。
最大的不同是处理平台从英伟达DRIVE PX 2,变成了特斯拉自研的FSD Computer,这个平台由两块FSD(Full Self-Driving全自动驾驶)芯片组成。这就是HW3.0。
2013年,就在马斯克推特官宣进军自动驾驶系统的几乎同一时段,特伦离开谷歌,克里斯·厄姆森接手了谷歌
的无人车项目。
站在今天回顾,谷歌的商业化进程就是从这个时候开始掉队的。
根据美国汽车工程师学会SAE发布并修订的《标准道路机动车驾驶自动化系统分类与定义》,自动驾驶被分为L0-L5五个级别。
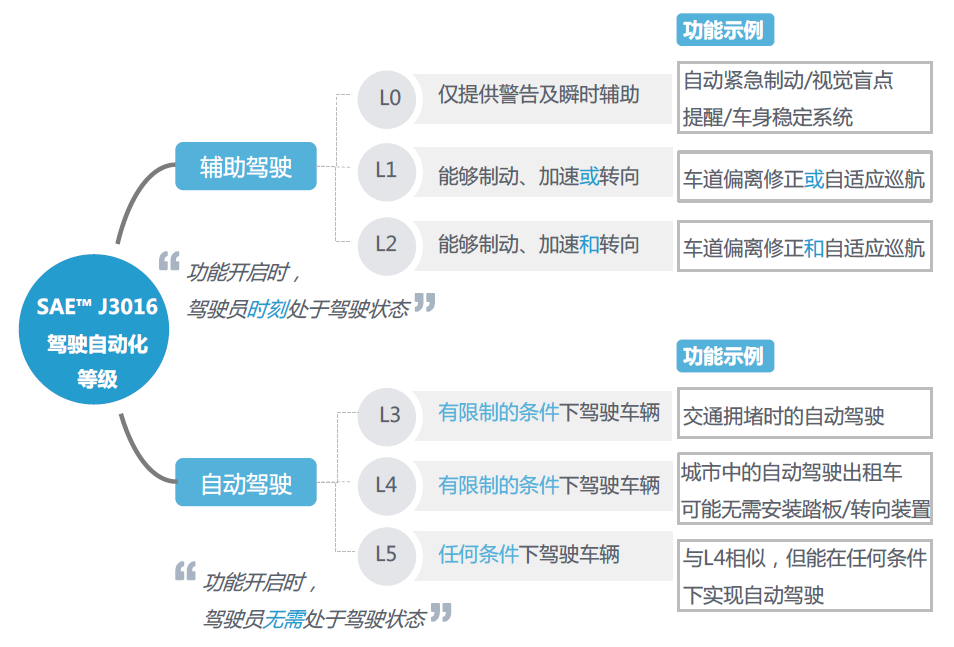
Autopilot最初发布时属于L2级别,严格来说其实还不能叫自动驾驶,只能叫辅助驾驶。而谷歌的无人驾驶项目,从一开始瞄准的就是L4-L5级别
,他们最初甚至根本不想在车上放置方向盘和油门。
但一步到位的想法过于理想化,2016年,谷歌将其无人车项目单独拆分出来,这就是今天的Waymo。这家始终被认为是自动驾驶领域技术最前沿的公司,却在商业化进程上被特斯拉远远甩在了身后。其中最重要的一个原因,就是二者使用的传感器配置方案不同。
我们上面说过,
自动驾驶系统主要分为三个层面,首先就是感知层。这个层面目前主要有三种流派:
-
以摄像头主导+多传感器辅助的流派,代表就是
特斯拉
,和国内的
理想汽车
。
-
以摄像头+毫米波雷达共同主导+多传感器辅助的流派,宝马、奔驰等多家传统车企,以及国内的
蔚来、小鹏、比亚迪
等等,都采用的是这种技术路线。
-
以激光雷达主导+多传感器辅助,代表是
Waymo
和奥迪。
这些传感器各有优缺点,我们做了一个简单的图表总结:
可以看到,
激光雷达的解决方案,有一个致命的弱点:实在太贵了。
2012年Waymo曾经公布过其无人驾驶车辆的成本,整车共计15万美元,仅Velodyne提供的激光雷达就占了其中50%,单颗售价高达7.5万美元。
这直接阻挡了Waymo迈向商业化的脚步。
无奈之下,谷歌宣布开始自研激光雷达技术,直到2017年,Waymo才宣布其激光雷达单颗成本由7.5万美元下降到7500美元。
但由特斯拉掀起的第一波自动驾驶的商业化浪潮,在2017年已经开始走向尾声了。
Waymo虽然和传统车企克莱斯勒等厂商实现了合作,但居高不下的成本使其开发的这套解决方案,始终没能找到与乘用车市场的结合点。
在乘用车市场追上来的,是在2015年后开始突飞猛进的中国造车新势力。
目前来说,感知层传感器的性能和技术,大体都到了比较成熟的阶段,各个车企无非是按照需要来进行配置,并设置一部分冗余来增加安全性。特斯拉的传感器性能和其他厂商没有大的区别,这个领域也有很多有竞争力的中国企业,比如A股上市公司德赛西威等。
真正对自动驾驶系统性能产生决定性影响的,是决策层。
决策层又分为两个方面,一是硬件,二是软件。
我们首先来看软件方面。
特斯拉在推行AP系统的时候,采用的是硬件预埋的模式。也就是说,每一辆车出厂时都配备了AP系统所需的全套硬件。特斯拉售卖的,其实只是软件系统的开启权限。AP系统的售价从3000美元到8000美元不等,当你花了这笔钱,特斯拉会通过软件后台,帮你开启这部分功能服务。
但注意,即便你没有选配这个系统,也不意味着这些传感器和处理核心不工作了。
特斯拉有一个
“影子模式”
,不论你的前台服务是否开启,这些配套硬件都会在后台持续收集你的行驶数据,包括你处理各类路况的行为方式,然后上传到云端,帮助特斯拉训练Autopilot系统。这意味着特斯拉每售出一台车,都会得到一只新的“小白鼠”;每一次出行,都会成为一场实际意义上的“路测”。
简而言之,
不管你能不能用Autopilot,反正Autopilot都在用你。
在过去6年的时间里,影子模式给特斯拉提供了大量的真实驾驶数据,特斯拉的“路测里程”是以10亿计的。这个数据的量级,远远高于任何一家公司的路测数据库。
我们在
《
TikTok大劫案:美国总统也抢不走的武功绝学到底是什么?
》
一文中,简述过AI机器学习的原理。通俗
点说,所谓机器学习,就是机器在积累经验。见过的状况直接模仿,相似的状况可以类比,但如果完全没有见过的情况,机器就很可能会出错。
特斯拉目前所拥有的数据量,对于其他车企来说,可能都是一个巨大的天文数字。而
数据量越大,训练量越大,机器就越智能;机器越智能,判断就越准确,系统就越受认可,用的人可能就越多——数据量就更大。
这是一个正向循环,滚雪球的过程。从这一点上来说,特斯拉的先发优势,达到了一个相当惊人的地步。无论是蔚来、小鹏,还是理想、威马,都只有望而兴叹的份儿。
唯一比较令人欣慰的是,特斯拉在中国市场上的数据领先优势,远远小于国际市场。
接着我们再来看决策层的硬件方面。
从上面那张各类传感器性能和特点的表格中可以看到,摄像头作为主要传感器时,会产生大量的视频图像数据。决策层要理解这些数据,则必然需要消耗巨量的计算资源。因此处理芯片的性能,就决定了系统的上限。
特斯拉一定要做自研芯片的原因即在于此。我们可以对比一下特斯拉从HW1.0到HW3.0的芯片性能:
然后再对比一下目前中国几大造车新势力与特斯拉FSD芯片的性能:
特斯拉FSD对标目前市面上的其他厂商芯片,在性能数据上有相当明显的优势。目前来说,小鹏的芯片供应商是英伟达,蔚来和理想的合作方都是Mobileye,只有零跑汽车在今年10月发布了自研芯片凌芯01,蔚来则刚刚宣布要进入自研芯片领域。
从自研芯片的角度来说,中国车企最少和特斯拉相差了2-4年的差距。
更大的问题在于,HW3.0上的FSD芯片,使用的还是14nm制程。但根据目前业界传出的消息,特斯拉已经和台积电进行接触,HW4.0系统的FSD芯片将采用7nm制程,预计会在2021年Q4投产。
英伟达和英特尔的下一代产品,也都会进入7nm制程时代。
这
就又回到
了国产半导体芯片的那个老问题:
7nm制程的芯片,我们自己做不了。
在软件上,特斯拉有着惊人的数据量做支撑;在硬件上,我们的自研芯片还刚刚起步,进度至少落后3-4年,目前采用的方案也在算力上有比较明显的差距。
那就意味着中国的乘用车自动驾驶系统没有机会了么?
当然不是。
狭义的自动驾驶系统只存在于车端,但广义来说,这是一个综合性的系统工程,车路协同,高精度地图,5G,云服务,商业落地情况,都从某种程度上决定了自动驾驶功能的实现程度。
中国车企目前至少有两个优势。









