本文转载自海鹰资讯(ID:hiwing_news)作者:北京海鹰科技情报研究所 王雅琳 文苏丽
来源:《无人系统技术》2017年第6期
随着国际环境的日益变化和相关技术的不断发展,美国将水下力量作为在“反介入/区域拒止”(A2/AD)环境下谋求不对称优势的主要抓手。2017年1月,美国防部国防科学委员会(DSB)发布了应美国防部委托开展的《下一代无人水下系统》报告,报告指出水下无人系统(UUS)的应用会为美国水下作战提供有力支撑,建议加快水下无人系统实战化,扩大水下无人系统发展计划并研究相关技术。2017年,美国国防预先研究计划局(DARPA)和海军各机构不断推进水下无人潜航器(UUV)等UUS及相关技术的研发和作战实践,推动美国水下无人作战能力不断发展。
2017年10月,美海军表示已将UUV的管理和投资部门由远征作战(N95)转移到水下战(N97),并将更加合理地发挥UUV的优势,以维持美海军的水下领先地位。
同时,美海军还成立了水下无人中队(Unmanned Undersea Squadron,UUVRON-1),该中队将为N97部门反馈相关实战经验,帮助其更好地判定未来作战需求。UUVRON-1中队计划于2020年达到完全作战能力,到2024年将配备包括LBS-UUV、大排量无人潜航器(LDUUV)和超大型无人潜航器(XLUUV)在内的45艘UUV。目前UUVRON-1中队也在测试Iver(一种商用低成本自主潜航器)、Remus和蓝鳍(Bluefin)等UUV。此外,UUVRON-1中队还派遣了两只队伍用以搜索2017年11月失事的阿根廷潜艇。
另外,在UUVRON-1中队基础上,美海军还建立了潜艇发展中队(Submarine Development Squadron,DEVRON-5),该中队也将配备多种UUV,用以发展和试验新型潜艇作战能力。
目前,美海军正在建立一个正式机制来管理UUV的全部事宜,该机制能够判定舰队对UUV作战能力的需求,并集中资源研发相关能力,保证所有UUV的作战性能均得到提升。
举办水下无人系统先进技术演习,加速未来水下作战技术发展
美海军于2017年8月举办了先进海上技术演习(ANTX),该演习由美海军水下作战中心(NUWC)举办,旨在展示能在未来应用的先进水下无人系统及其相关技术,自2015年以来每年举办一次。2017年ANTX的主题为“对抗环境下的战场准备”,在水下领域重点展示了水下网络及节点、基础设施防护和水下导航等先进技术。
在水下网络和节点技术方面,通用动力公司团队演示了两个作战场景。场景一:一艘水面舰船投送了一艘蓝鳍-21UUV,该UUV携带了一艘蓝鳍-沙鲨微型UUV和装有黑翼无人机的发射筒。发射筒上浮至水面发射黑翼无人机,与作战控制系统建立了数据通信链接,蓝鳍-沙鲨完成ISR任务后,通过与黑翼无人机链接,将情报信息传回至作战控制系统。之后,控制系统还可以通过黑翼无人机指挥蓝鳍-沙鲨执行其它任务。场景二:由潜艇发射蓝鳍-沙鲨,UUV完成任务后通过水中的调制解调器将数据传递至一部光学与功率分路器,该分路器可将收到的信息分发送至不同位置。
在水下基础设施作战方面,诺格公司利用指控系统,同时控制8艘/架无人系统进行了水下基础设施防护演示,其中尺寸较大的Proteus UUV携带了尺寸较小的Remus-100和Riptide UUV,用于监视己方水下基础设施,并向战术作战中心进行汇报。交战时,另一艘Riptide UUV和一艘Iver UUV充当敌方对己方水下基础设施发动攻击,Remus-100进行作战毁伤评估。演习还使用了一架无人机中继水下无人系统间的通信,另外还有两艘无人水面艇负责监控进出作战区域的水上交通情况。
在水下导航技术方面,首次参加ANTX演习的波音公司展示了搭载传感器的自主遥感水面艇(SHARC)。SHARC无人艇利用太阳能及波浪能量推进,平均工作时间可达6个月,能够自主部署海底传感器并测定其位置,再通过卫星来传递该数据。在演习中,通过两艘SHARC无人艇组网为经过该区域的其它作战系统创建了全球定位系统。海底传感器较容易暴露于敌方的有人船只更加经济、快速、隐蔽和安全,SHARC无人艇则充当了水下系统与卫星之间的通信网关。
常规水下无人潜航器研发持续推进,部分项目因预算影响受到调整
美海军根据作战任务的不同,发展了多型UUV,2017年主要推进用于执行反水雷任务的梭鱼(Barracda)和刀鱼(Knifefish)水下无人潜航器以及集多种任务能力于一身的大型无人潜航器XLUUV和LDUUV,其中LDUUV项目因预算原因而受到调整。
梭鱼水雷压制(Barracuda Mine Neutralizer)是一种模块化、低成本、半自主的消耗型UUV,大小类似于空中发射的声呐浮标,长0.9米,直径12.7厘米,装有爆破战斗部,一旦触碰碰到水雷,就会连水雷一同爆炸。美海军于2017年2月发布了该项目公告,近期有可能部署至通用无人水面艇(CUSV,属于濒海战斗舰反水雷任务部的一部分),未来还可能通过直升机或固定翼机载的声呐浮标发射装置来发射。
刀鱼无人潜航器是美海军濒海战斗舰反水雷(MCM)任务包的一部分,能够探测海底埋藏的水雷。2017年3月,刀鱼无人潜航器完成了综合评价工作,标志该项目达到重要里程碑节点,其在多深度下探测和区分潜在水雷威胁的能力得到验证。
XLUUV是一种采用模块化和开放式架构的水下潜航器,可执行反水雷、反潜、反舰和电子战等任务。美海军于2017年9月分别向洛马公司和波音公司授予XLUUV项目阶段性竞争合同,计划未来12到18个月后最终选定一家承包商。2017年6月,波音公司的XLUUV方案——回波旅行者(Echo Voyager)号进行了首次海试,检测了通信、自主、推进、系统集成和电池等方面的性能。

回波旅行者号
然而,因受到美海军预算缩减的影响,LDUUV项目的时间安排将推迟两年。LDUUV是一种察打一体的大直径重型UUV,能够搭载不同传感器和任务模块,能够数月、远距离执行扫雷、跟踪、ISR和自主攻击等任务。LDUUV既可以独立使用,也可以部署至水面舰船和潜艇。LDUUV最初计划于2017年服役,目前计划于2019年进行原型机海试。
继续发展水下预置式系统,凭借隐蔽潜伏优势控制关键海域
针对海上作战时前线部署各类平台和武器面临的成本和保障问题,DARPA近年来发展了一类可在水下长时间隐蔽潜伏并能即时唤醒执行侦察与打击任务的无人平台,即海德拉(Hydra)和可升降有效载荷(UFP)项目。
2017年4月,DARPA授予波音公司价值760万美元的修订合同,用于继续支持Hydra项目第二阶段的工作,预计将持续至2019年1月。Hydra项目旨在演示验证一种可以快速将无人机和UUV等隐蔽运送至战场的水下无人运载系统,可以配合有人驾驶的舰船、潜艇和飞机,交替进行水上、水面及水下的载荷投送。该项目的关键是研发可提供情报、监视与侦察(ISR)、反水雷等重要能力的模块化有效载荷。这些有效载荷模块使用标准化封装,以保证运输、储藏及发射上的安全性,同时确保这些载荷的功能可以持续数周乃至数月。Hydra项目于2013年7月启动,第一阶段重点关注整体方案设计;2016年9月,项目进入第二阶段,主要进行载荷和模块化封装接口的研发和验证。
UFP项目旨在寻求一种可在深度大于6千米的海底遂行5年甚至更长时间的潜伏、在防区外激活并迅速上升、配置有效载荷和武器的水下作战平台。UFP项目于2013年1月启动;2016年,UFP项目进入第三阶段,开始在水下环境中的演示验证实验。
探索多系统协同作战概念,从全作战域加强海洋控制能力
为了维持美海军在对抗激烈广阔海域的海上优势,DARPA通过推动跨域海上监视与瞄准(CDMaST)项目来探索新型海洋系统之系统(Systems of Systems,SoS)作战概念。2017年9月DARPA发布了CDMaST项目第二阶段广泛机构告知书(BAA),将开展工程化研究。该项目旨在促进空中、水面、水下的指挥、控制、导航定位和授时、通信、传感、武器和后勤等领域的发展,并将这些功能分散到多种低成本、可升级的空中/水下平台,构建一个由有人和无人系统组成的分布式跨域作战网络架构,以此来维持美军对作战海域的控制权。CDMaST项目于2015年11月启动,通过第一阶段工作,DARPA已经完成了海上SoS概念体系架构开发;第二阶段将对技术和作战的可行性进行试验分析,并重点对反潜战和反水面作战架构进行开发和验证。
此外,美海军还依靠黑翼潜射无人机作为通信中继,拓展水下无人系统跨域感知能力。黑翼无人机是美国航空环境公司在弹簧刀无人机基础上研发的一种管式发射小型无人机,配有先进的微型光电/红外传感器、一体化惯性/GPS自动驾驶仪系统和Link 16数据链,能够为潜艇、UUV和其它飞行器提供信息中继,可从水下由潜艇或UUV发射。近年来美国海军不断推动黑翼无人机的研发和采购工作,以期实现水下无人系统跨域获取目指信息的能力。美海军水下战中心于2017年10月授予美国航空环境公司一份250万美元的合同,用于采购黑翼无人机,首批预计2018年5月交付。
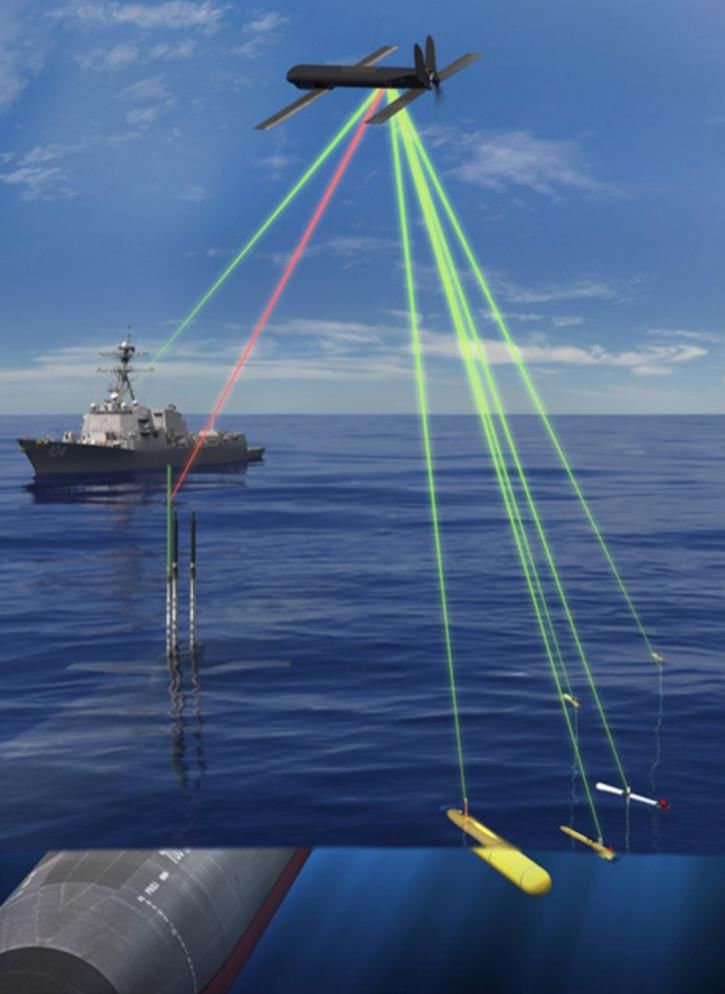
黑翼无人机通信中继示意图
大力发展水下通信技术,增强水下无人系统信息获取能力
由于海洋水体的特殊性,水下作战平台之间以及与水面上平台和中心的通信都存在许多问题,很难满足未来水下作战对信息传递的需求。美军近年来连续启动水下通信技术研发项目,推动水下光学、声学和无线电通信技术发展。
模块化光学通信(OCOMMS)载荷项目旨在寻求一种光学全双工通信载荷实现空中水下平台间的跨介质通信和水下平台间的通信,这种光学通信方式的数据通信速率高,且具有低截获概率和低探测概率(LPI/LPD)特性。美海军空间与海战系统司令部于2017年3月发布模块化光学通信(OCOMMS)载荷项目公告。
水下多声传感器可靠配置异构集成网络(SEA-URCHIN)项目将先进物理层算法引入水下通信调制解调器,使用多种网络协议将传感器信息及时传送到信息中心,以提高水下声通信的可靠性和覆盖范围。DARPA于2017年3月选择以色列航空工业公司(IAI)开发SEA-URCHIN项目。
机械天线(AMEBA)项目旨在利用特低频(ULF)和甚低频(VLF)无线电波能够水、土壤、岩石、金属和建筑材料的优异穿透与绕射性能,实现军用远程通信。ULF通信将使在水下作业的有人和无人平台之间进行直接通信以及发送数据、文本甚至语音成为可能。2017年8月,DARPA陆续向6家承包商授出了AMEBA项目第一阶段研发合同,标志着该项目正式启动。

机械天线项目示意图
美国海军于2017年3月向航空喷气洛克达因公司授出合同,发展用于UUV水下无线充电的电力与能源管理系统,该合同美海军研究局(ONR)前沿部署能源与通信前哨(FDECO)项目的一部分。该管理系统能使UUV不必航行至港口或舰艇附近就能进行无线充电和数据的上传下载。
美海军空间与海战系统司令部太平洋中心于2017年8月底表示正在研发可以在水下为UUV无线充电的技术。该技术以共振无线充电为基础,利用共振的方式传递能量,可以为一个拥有相同频率接收器的物体充电,不过在水下充电需要考虑海水传导能力较弱的问题。该中心还在研发可为不同尺寸UUV充电标准化的水下充电站。该技术的成功应用将延长UUV的工作时间,极大拓展UUV的任务范围并更好的保障其安全。
随着潜艇隐蔽性的不断提高,水下探潜也成为UUV的主要作战任务之一。2017年7月,DARPA授予BAE系统公司移动舷外隐蔽通信和方法(MOCCA)项目第一阶段合同,用以发展利用UUV的新型声呐探潜技术。
MOCCA项目将研发一种主动声呐系统,由UUV携载小型主动声源发射声波,再利用潜艇检测设备监听回波信号;同时,为了实现潜艇位置隐藏、远距离的探测跟踪潜艇对UUV的指挥控制,项目还将研发潜艇与UUV间可靠的隐蔽通信技术。DARPA于2016年1月公布MOCCA项目,第一阶段将主要进行声呐系统及通信概念的初始设计。
 结束语
结束语
2017年,美国从部署、装备和技术等多方面促进自身水下无人系统的发展,尤其是成立专门的水下无人系统作战编队并参与实战应用,表明其水下无人系统已具备较成熟的作战能力。未来,美国将在继续发展装备和技术的基础上更多地研究水下无人系统的作战使用,探索新型水下无人作战模式,这将为水下作战和海上作战带来革命性的变化。

一网打尽系列文章,请回复以下关键词查看: |
创新发展:习近平 | 创新中国 | 创新创业 | 科技体制改革 | 科技创新政策 | 协同创新 | 成果转化 | 新科技革命 | 基础研究 | 产学研 | 供给侧 |
热点专题:军民融合 | 民参军 | 工业4.0 | 商业航天 | 智库 | 国家重点研发计划 | 基金 | 装备采办 | 博士 | 摩尔定律 | 诺贝尔奖 | 国家实验室 | 国防工业 | 十三五 | 创新教育 | 军工百强 | 试验鉴定 | 影响因子 | 双一流 | 净评估 |
预见未来:预见2016 | 预见2020 | 预见2025 | 预见2030 | 预见2035 | 预见2045 | 预见2050 | |
前沿科技:颠覆性技术 | 生物 | 仿生 | 脑科学 | 精准医学 | 基因 | 基因编辑 | 虚拟现实 | 增强现实 | 纳米 | 人工智能 | 机器人 | 3D打印 | 4D打印 | 太赫兹 | 云计算 | 物联网 | 互联网+ | 大数据 | 石墨烯 | 能源 | 电池 | 量子 | 超材料 | 超级计算机 | 卫星 | 北斗 | 智能制造 | 不依赖GPS导航 | 通信 | MIT技术评论 | 航空发动机 | 可穿戴 | 氮化镓 | 隐身 | 半导体 | 脑机接口 |
先进武器:中国武器 | 无人机 | 轰炸机 | 预警机 | 运输机 | 战斗机 | 六代机 | 网络武器 | 激光武器 | 电磁炮 | 高超声速武器 | 反无人机 | 防空反导 | 潜航器 | |
未来战争:未来战争 | 抵消战略 | 水下战 | 网络空间战 | 分布式杀伤 | 无人机蜂群 | 太空站 |反卫星 |
领先国家:俄罗斯 | 英国 | 日本 | 以色列 | 印度 |
前沿机构:战略能力办公室 | DARPA | Gartner | 硅谷 | 谷歌 | 华为 | 俄先期研究基金会 | 军工百强 |
前沿人物:钱学森 | 马斯克 | 凯文凯利 | 任正非 | 马云 | 奥巴马 | 特朗普 |
专家专栏:黄志澄 | 许得君 | 施一公 | 王喜文 | 贺飞 | 李萍 | 刘锋 | 王煜全 | 易本胜 | 李德毅 | 游光荣 | 刘亚威 | 赵文银 | 廖孟豪 | 谭铁牛 | 于川信 | 邬贺铨 | |
全文收录:2016文章全收录 | 2015文章全收录 | 2014文章全收录 |
其他主题系列陆续整理中,敬请期待…… |










