
新智驾按:本文内容来自千寻位置网络有限公司业务总监裴世兵在硬创公开课的分享,由新智驾编辑整理。
裴世兵,现任千寻位置网络有限公司业务总监。在卫星、导航、交通相关领域深耕15年有余,在技术研究、系统研发、市场拓展、行业分析等领域有丰富经验,拥有17项国家发明专利,对组合高精度卫星定位技术在自动驾驶领域的应用有深入理解。
2014年,裴世兵承担首个海外北斗地基项目-巴基斯坦国家北斗地基增强网的规划建设;2016年负责车道级导航系统研发,实现了车道级高精度地图采集制作与车辆高精度定位技术;组织研发了国内首辆自动驾驶电动汽车。
本期雷锋网公开课包括以下内容:
1、自动驾驶系统
2、高精卫星定位对自动驾驶的价值
3、高精卫星定位实现方法
4、高精卫星定位基础建设(by 千寻)
5、自动驾驶中的高精定位技术方案
6、自动驾驶汽车高精定位案例
*公开课全程视频
1、自动驾驶系统

一辆自动驾驶汽车就像一个人,它需要几个部分:
-
第一,它需要眼睛来感知环境。
-
第二,它需要大脑来做出决策。
-
第三,它需要手脚来控制行为。
那么如何实现感知、决策和控制呢?感知就类似人的视觉、听觉、触觉,对于车辆来说,它是通过一些传感器来实现感知的,通过传感器,自动驾驶系统能够了解周围的车、人、交通状况、所处位置等。
决策是比较关键的一部分,决策是在感知基础上对下一步(加速还是减速、如何转向等)进行判断,同时,决策系统还会兼顾舒适性和安全性问题。
控制指的是车辆本身的一些控制系统,它通过决策大脑对车辆下达一些指令,比如说转向、刹车、加速。
2、高精卫星定位对自动驾驶的价值

我们的主题集中在自动驾驶系统的感知层面,其中的关键是传感器。
从国际来看,自动驾驶汽车的传感器无外乎这样几种:高精度卫星定位系统,组合惯导,激光雷达,摄像头,微波雷达,超声波雷达等等,很多传感器构成了整个车辆的感知系统。

有了这样的感知系统,车辆才能对外界的环境、自己所处的位置有一个清楚的了解,那么每个传感器的这个特点是怎样的呢?在此简单介绍一下:
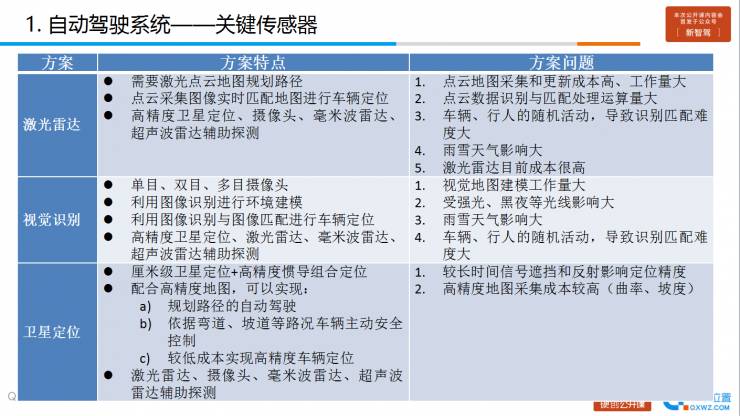
(1)激光雷达。
激光雷达是目前自动驾驶系统最常用的传感器之一,它是通过激光扫描实时生成3D点云地图,再将实时扫描地图与地图库匹配来定位车辆,去做相对定位。
同时,激光雷达也能够识别行人、车辆、车道线、马路边线以及周边环境距离等信息。它的优势是探测精度非常高(毫米级),探测距离能达到百米的量级。但是它也存在一些缺点:
首先激光可视范围内如果有遮挡,例如有树、垃圾桶等遮挡,就无法进行识别;
第二,由于激光波束靠反射来识别,所以无法识别颜色图案、文字等标识;
第三,目前最主要的问题是,激光雷达的成本相对来说依然很高,一个64线激光雷达成本超过几十万,所以普通车辆其实是很难用在上面的;
第四,传统激光雷达的传动部件是机械的,长期使用会造成磨损。当然,目前的一些新技术已经在解决这个问题,并且成本会逐渐下降。
(2)视觉传感器
,即摄像头,包括单目、双目和多目。
视觉传感器可以利用图像匹配,也能够实现车辆定位,以及对周围环境的3D建模。
同时,视觉传感器可以识别行人、车辆和车道线等,也能够判断距离。它的优势是相对于激光雷达而言成本非常低,而且能够识别路牌、交通灯甚至是一些文字信息;也存在一些缺陷,比如遮挡情况是没办法识别的,并且强光和黑夜等条件下,识别率相对来说比较低。例如北京的雾霾天气,识别率也是不高的。
(3)毫米
波雷达。
毫米波雷达目前是一个非常成熟的技术。很多高档车前端的防撞雷达,应该用的都是毫米波雷达,这种传感器测量精度和测量距离以及成本都是没有问题的,但是它的探测角度比较小,并且通常需要多个雷达来完成一个探测任务。
(4)超声
波雷达。
超声波雷达主要用于探测近距离障碍物,用在倒车、自动泊车等方面。超声波的探测距离一般在3-5米以内。
(5)RTK
接收机。
这是目前我们所了解的自动驾驶系统普遍会采用的一个技术,它利用高精度卫星定位,实现对车辆的厘米级定位,并且能够通过双天线的接收机,确定车身的航向,甚至是俯仰。
RTK接收机的优点是定位精度高、使用简便,成本也相对比较低。但是它也存在一些问题,因为受电磁环境影响,比如说干扰、环境遮挡反射等等,这会造成它的定位精度下降。
(6)高精度
组合惯导。
组合惯导其实是利用陀螺和加速度G去推算车辆的位置、航向和加速度。通过这样一些参数积分,自主推算车辆在当前速度和加速度情况下,下一个时刻所处的位置。
它的优势是不依赖外界环境,靠自身就可以实现定位。但存在的问题是,如果长时间推算,存在一个累计误差,随着时间越来越长,如果没有办法给它提供校正的话,这个误差就会越来越大。
目前的自动驾驶方案大概就是以上几种,每一家厂商在设计和应用自动驾驶系统时,都会或多或少去偏重某一类传感器,比如说有的会偏重激光雷达,有的偏重视觉,有的会偏重卫星定位,不同的方案各有优缺点,如下图。
如何看待高精度卫星定位对自动驾驶的价值?

第一,极端天气和环境下的位置感知。
举个例子,雨天积水发射灯光、冬天路面积雪覆盖等情况下,利用视觉传感器和激光雷达是很难识别车道线的,又如在没有车道线的道路,如开阔的广场,或比较大的院子或停车场里面,这样的封闭区域不一定有明显的道路边线,周围又没有相对比较容易辨识的参照物,所以视觉和激光雷达很难做出相对定位。
但高精度卫星定位是不受这些因素的影响的。高精度定位配合高精度地图,车辆可以对自己的位置做出非常准确的判断,而后控制车辆按照预定方向行使。这是我们认为高精度定位对自动驾驶带来的第一个价值。
第二,自动驾驶的安全性和舒适性。
例如车辆在一条很长的高速路行使,如果在这条高速路上有一个很急的弯道,如果用视觉或激光雷达的方式去判断,车辆快开到这个弯道的时候才能去做出判断,这样会造成急刹车、急转弯等现象。
这个时候会给整个驾驶的安全性和舒适性造成影响。但如果使用高精度定位技术,车辆对自己的位置有清晰的了解,车辆可以通过自己的智能决策系统去判断,什么时候、提前多少米开始刹车、转向以及转向的角度。这种方式提升了整个驾驶系统的安全性和舒适性。
第三,V2X应用。
在交叉路口的车辆穿行和避让场景中,如果每一辆车都能够精确地定出自己的位置,通过车车通信和车路通信把自己的位置分享给其他车辆,那么每辆车都会对彼此的位置和路口的交通情况有清楚的了解。
通过这样一种智能路车调度系统,可以实现交叉行驶车辆的调度。达到一定程度的话,甚至可以取消红绿灯。
第四,节省自动驾驶系统运算量。
利用图像识别和激光点云算法,不管是存储量还是运算量都是巨大的,所以目前我们看到一些自动驾驶车的后备箱里,实际上放了一个非常大型的服务器去做运算和处理的。这种模式是很难实现工程化或者商业化应用的。
如果利用卫星定位,就可以定位出车辆大概在这个道路的某一段,或者说在道路非常精确的某一个路段上,在做点云匹配时,就完全没有必要把整个城市或整条道路的这个点云图像数据库都调入做匹配处理,只需要调用一段数据就可以了,这样会大大缩短存储量和运算量。
所以目前,一些自动驾驶汽车用工控机就可以完成系统处理。
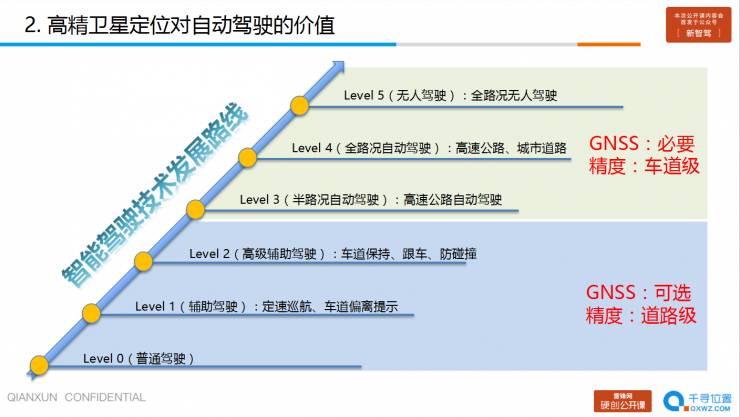
目前业界普遍划分的自动驾驶分为5个阶段:Level 1—Level5。
现在大多数上处于Level 2以下,即高级辅助驾驶,能做到跟车、防碰撞、车道保持等。
在Level 2以下的阶段,卫星定位技术对整个辅助驾驶系统来说是一个可选项,不一定是必须要有的。同时对于卫星定位的精度要求,也是仅在道路级即可,主要用于道路导航。
当自动驾驶技术发展到L3以上时,要求车辆L3在高速公路、停车场泊车等特殊场景中实现自动驾驶。这些都是需要高精度卫星定位的,并且对精度的要求也越来越高,精度要求做到车道级,这样才能做到在高速公路上并线或是上下匝道,并确保车辆的安全性。
3、高精卫星定位实现方法
如何实现高精度卫星定位?
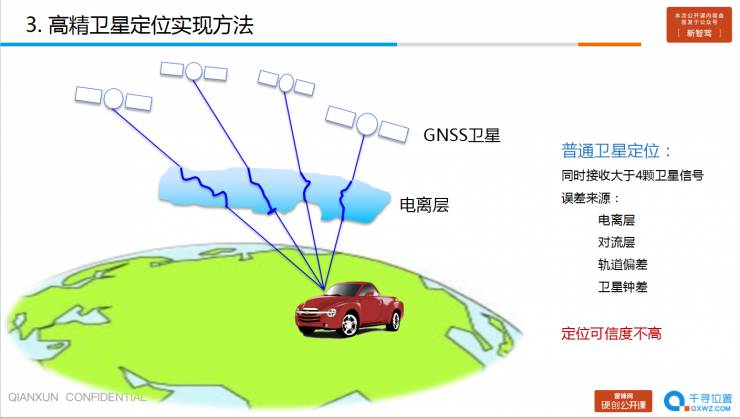
首先介绍一下普通卫星定位的原理。地面上一个接收机,在同时接收天上4颗卫星信号的时候就能够实现定位,为什么要4颗卫星呢?
我们都知道,X、Y、Z三个方向需要三颗卫星,三个方程完成定位。但事实上,时间也是一个不确定性,所以未知数有四个:X,Y,Z和T。所以当地面接收机收到4颗卫星信号的时候,它会根据4个方程解算出当前的时刻,以及X、Y、Z的坐标。
但是这种方法存在一些误差。比如信号穿过天空的电离层和对流层时会产生一定的扰动,会造成信号延迟同时产生误差,同时我们观测的卫星轨道等都会存在一定抖动,所以普通卫星定位存在比较大的偏差,它的可信度是不高的。
如何解决这个问题?
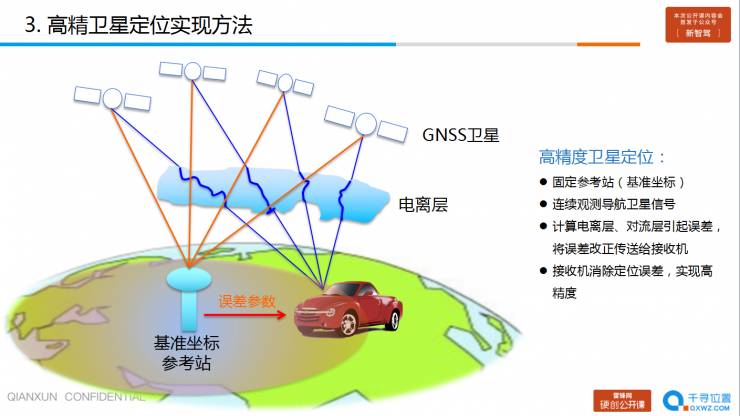
我们提出这样一个办法,就是在地面上建立基准坐标的参考站。这个参考站是有要求的。它所建立的位置坐标是要永远不变动的,我们甚至要求将它建在基岩上,如果这个地方土层比较松动,我们会向下挖,一直挖到冻土层的时候,确保这个基准站的坐标是固定不动的。
这样的基准站会连续7×24小时观测所有能观测的卫星信号,由于它的自身坐标是已知的,所以通过观测卫星信号,它能够反向推算出电离层、对流层的误差,以及卫星轨道的误差,总结形成一系列误差参数。
这些误差参数通过某个传输方式传给接收机,接收机在定位的时候,就可以在运算过程中把误差减掉。
通过这种方式,我们就能够实现高精度的卫星定位。那么,因为误差参数传递是不同的,所以对于接收机来说,差一点的可以做到米级,甚至是亚米级精度,好一点则是厘米级误差。这就是高精度卫星定位的基本原理。
目前,高精度卫星定位在应用于自动驾驶时,普遍使用的是RTK技术,我们称之为载波相位差分技术。
这个定位算法其实并非新技术,早在10年前,它就已经有成熟的应用了。
举个例子,我们现在的测量测绘领域,比如要修路、架桥或是盖楼,地基、路基都是通过RTK技术去画线,又如从河的两岸往中间架桥的时候,你会发现桥梁合拢时候中间能够刚好对齐,这都是采用了RTK定位手段,使两边的桥梁可以非常精准地合拢在一起。
其他方面,如车辆应用上,我们最熟悉的就是驾考系统。考试车辆装有两个RTK定位设备,它能够把车辆虚拟成一个方框,与地图中的车库线位置匹配,当车辆出库和入库的时候,一旦超出这个车库的边界线,系统就会及时报警。
另外,RTK技术还应用在精准农业,黑龙江省80%的大马力拖拉机已经全部安装了自动驾驶系统,可以自动播种或收割。
4、高精卫星定位基础建设
所以,RTK应用在传统行业其实并不陌生。但它也存在问题,就是作用范围是有限的。
目前像驾校、精准农业,通常会架一个单站,在附近范围作业。但这样的系统对智能交通或自动驾驶来说,可能在园区中做一个demo是没有问题的,但很难应用到实际的商业领域中。怎么办呢?




