位于俄亥俄州的小城代顿早年曾经是美国中部的硅谷。俄亥俄州人口一度占到全美的近60%。代顿是重要的物流集散地和制造业重镇,这里有极高的博士密度,还是美国航空业的发源地。
再度相隔两年后,Oculii研发的77Ghz雷达也即将量产。相比24Ghz雷达,77Ghz产品体积更小,分辨率更高,更适用于车载与自动驾驶。
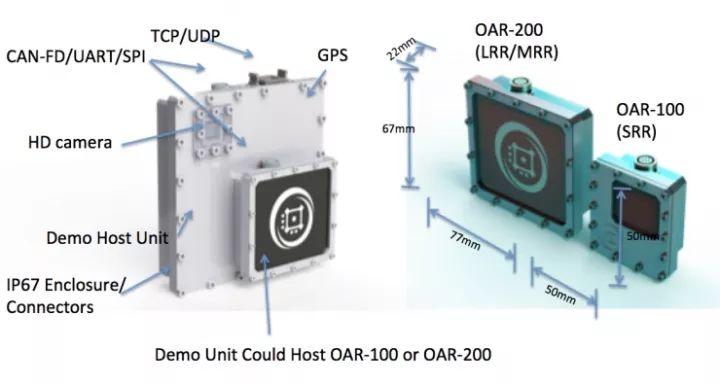
Oculii的77Ghz雷达新品:OAR-200用于LRR和MRR(200米之外);OAR-100用于SRR(100米之内)
洪琅告诉新智驾,Oculii的77Ghz雷达新品有几个特点:
4D,输出X、Y、Z坐标和速度矢量;
数据接口更加开放,这样有利于与其他传感器的融合与二次开发;
因为使用TI一款高集成度的芯片,Oculii的77Ghz产品体积小;
高分辨率,并且Oculii计划通过自研的虚拟孔径技术在明年将77Ghz毫米波雷达的角分辨率优化到1°以内。
下文是9月份新智驾对洪琅的采访整理。新智驾对采访内容进行了不更改原意的删减。
洪琅在这次采访里聊到了之前近30年的教学与研究,Oculii现有产品的特性以及技术路径。
近30年的雷达研究
因为积累了几十年做各种雷达的经验,我们一开始就高举高打,直接推出了4D雷达。
4D雷达什么概念?现在一般的雷达是把运动的车辆投射在地平面上,返回二维的坐标数据,加上一维的速度,所以大家说是3D的。
我们的4D雷达可以检测不同高度,不同水平面上的运动物体,比如说雷达在坡底下,车在坡顶上;因为车一动起来,所有周围物体都是运动的,天桥、标志牌等等高处的物体都变成运动物体,我们要跟踪三维空间的所有运动物体。
传统的3D或者二维地平面空间加一维速度的雷达,把运动物体都投在一个平面上,会引出很多问题。比如前面有天桥,它是在地上还是在高处,3D雷达分辨不出来。更不用说二维雷达数据和视频的融合,因为没有纵向坐标,融合就有一点困难。
我们引入的4D雷达有几个特点:
跟LiDAR相比,现在毫米波雷达的测距精度已经基本可以与之媲美,我们雷达最高可以达到三点几厘米。LiDAR不可以直接测量速度,但雷达可以直接测量速度,且精度很高,所以这点是天生优越的。
雷达唯一的明显弱势就是角分辨率低,LiDAR的角分辨率可以做到很高。毫米波雷达为了增加角分辨率,传统做法就是增加雷达天线个数,但这会受到很大限制,比如体积上的限制。
但我们的做法是在不增加天线数量的情况下,采用软件虚拟的方法,计算获得多个天线的效果。总之,通过等效多天线来提高雷达的精度,我们目标是得到接近或等同LiDAR的角分辨率。
我们选择的是TI的一款芯片,这个芯片今年刚推出。我们把芯片的能量放大了,这个芯片原来只用于短距离雷达(SRR),我们放大之后可以用到中距离和长距离上(MR和LRR)。
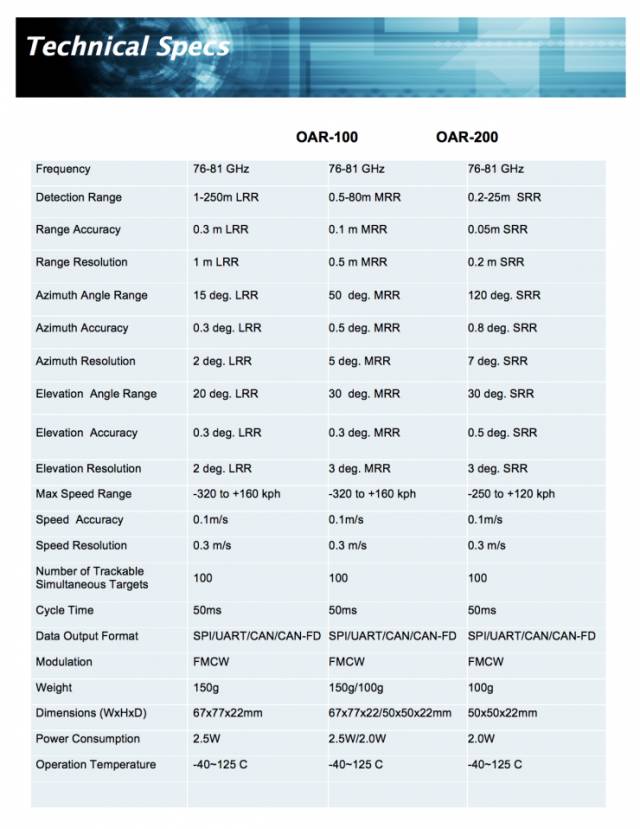
*Oculii 两款77Ghz雷达的技术参数
虚拟孔径技术,77Ghz雷达如何做到高角分辨率?
除了4D、数据融合、体积方面,我们的另一个方向是实现高清的角分辨率,我们现在朝这方面努力。
我们会在今年推出77Ghz的雷达,预计会在明年推出角分辨率1°以下的77Ghz产品。
实现高角分辨率,也是我们专利之一。得到高清的角度分辨率,现在有几种方法,一种是增加物理天线,前面说了增加物理天线有很多限制。
还有一种就是用合成孔径的方法(Synthetic Aperture,简称SAR),但这种情况下天线必须是运动的,它在运动的情况下采集若干相位,最终合成在一起。
但对于车载来说,因为车辆的运动轨迹很难保持稳定一致,所以很难保持相位的关联性。
而我们的做法是用相位虚拟的方法,得到等效多天线的效果。从理论上来讲几根天线可以达到100、200个天线的效果,但因为会受到芯片性能及其他限制等,实际能做到几十根天线效果。所以我们目标是1°以下的角分辨率精度。
教书、科研和现在,我觉得非常大不同就是,我做这几十年会觉得书本的东西到实际是有相当大的距离。我们之前做研究项目,只要科研做得好,资金是完全不用操心的。而我们现在要做量产化的的商用产品。
77Ghz这块,我们现在刚出样品,在中国找合作伙伴或者Tier 1进行车规生产。今年4月,我们已经完成A轮融资,信中利、三星风投都投资了,联想Commet Labs也有参与。
我们看到中国市场现在是世界上最大的汽车市场,而且还在迅速扩大,特别对于ADAS的需求特别大,自动驾驶的技术需求也非常大。我们在中国已经设立了机构,也希望和主机厂、Tier 1及自动驾驶技术公司广泛合作。
自动驾驶需要的传感器,毫米波雷达是很重要的一部分。任何传感器都不能相互取代,摄像头、激光雷达、毫米波雷达都会共存互补。大家看到激光雷达领域比较火热,技术上不断有新的突破。而毫米波雷达这些年基本上没有大的创新,大家看到了瓶颈,却没有办法打破它。
我们的目标就是打破瓶颈。毫米波雷达有全天候工作的优点,再通过技术弥补角精度上的劣势,可以发挥更大的作用。【完】