第五周我们要进行
Fab Academy课程的
3D打印部分。
1.3D打印
首先我从Thingiverse的网站上找到了许多网络上开源的许多模块,这是一个非常有用的网站,你可以在里面找到很多2D或3D的模块,这些开源文档可以帮助我们减少开发时间。

现在,让我们通过Thingiverse来制作一个真正的产品。我在Thingiverse游览时发现了Maker Faire机器人,并下载了文件。
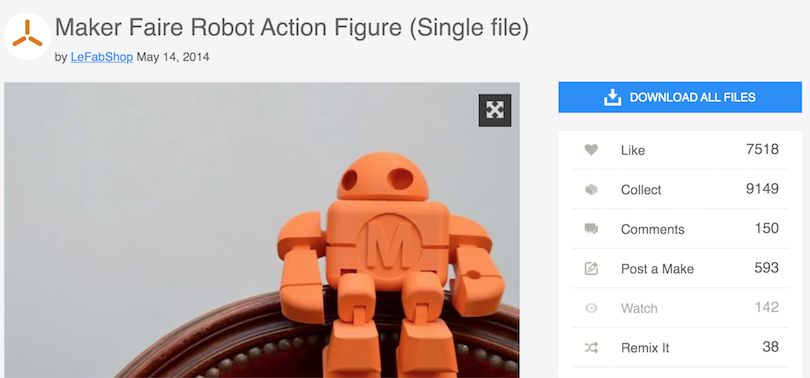
下载完后我发现这个文件很有趣,机器人是由一个部分创建的,但通过打印后我看到它的胳膊和腿可以进行轻微移动。这一点对我今后的项目思路很有帮助。
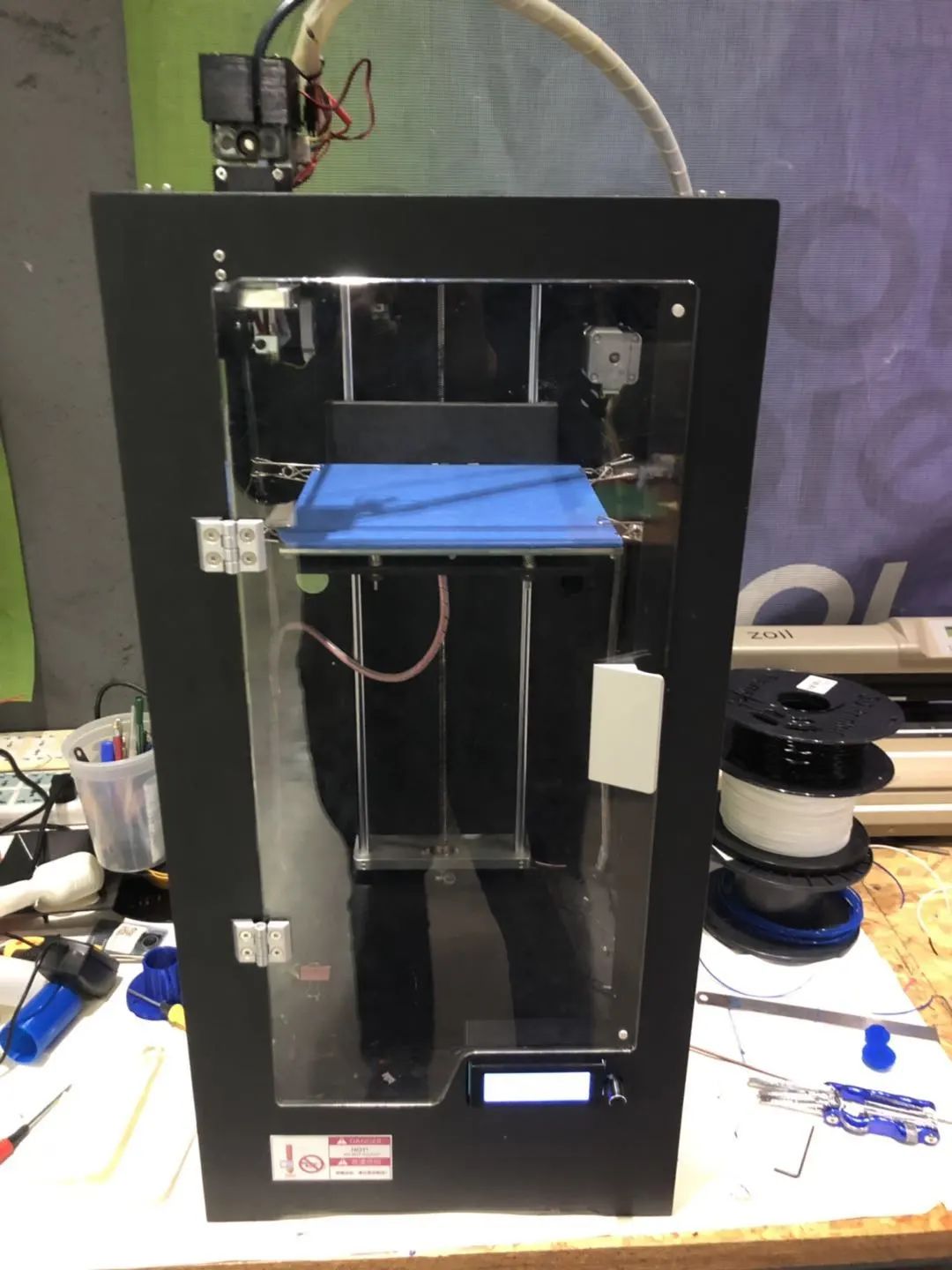
我使用的是中文版的3D打印机,这是一种FAM型的3D打印机,可以加工PLA、ABS或一些硅胶材料。
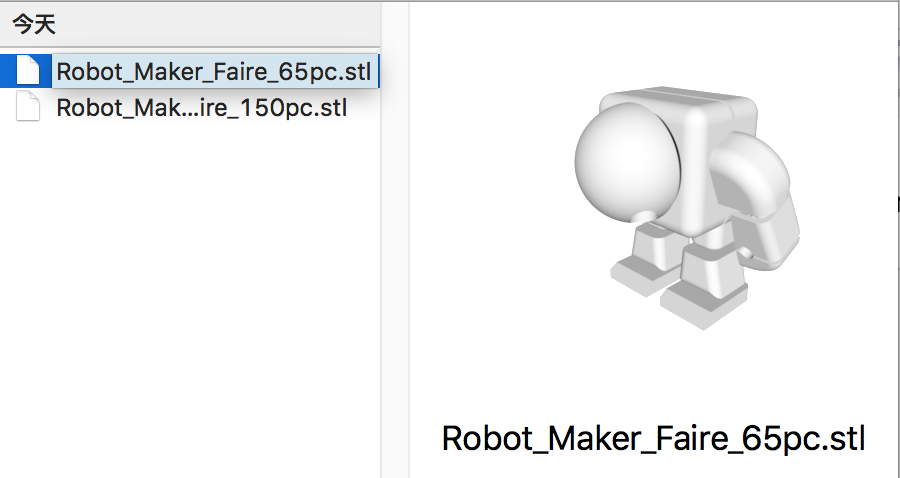
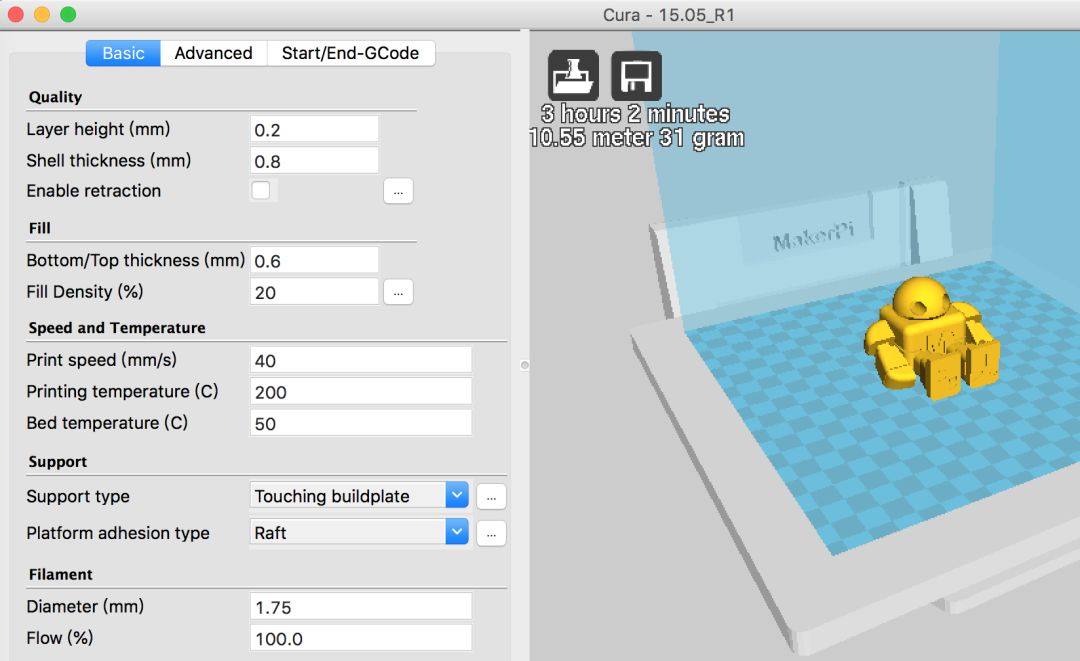
接下来,我们通过软件“Cura”找到STL文件进行处理。
选择我们使用的3D打印设备。
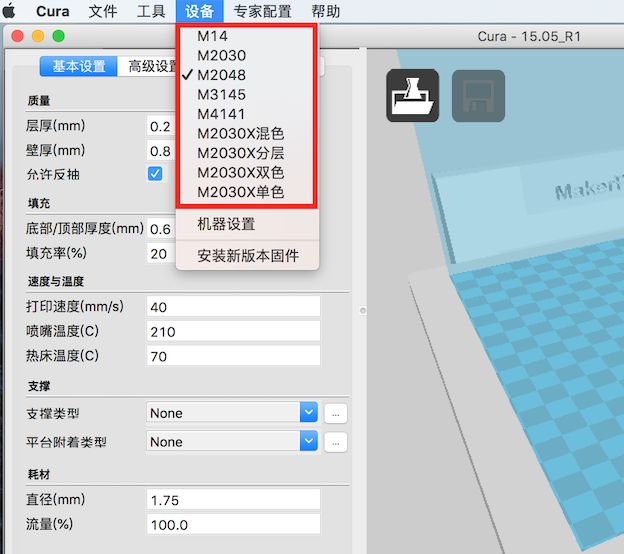
加载STL文件并按如下所示参数进行设置,其中包括质量、填充、速度、温度、支撑、灯丝。材料方面我选择的是PLA材质,因此我需要将灯丝直径设置为1.75mm,并且温度处于180-210℃也很重要,如果要使用ABS材质,温度应在230℃左右。
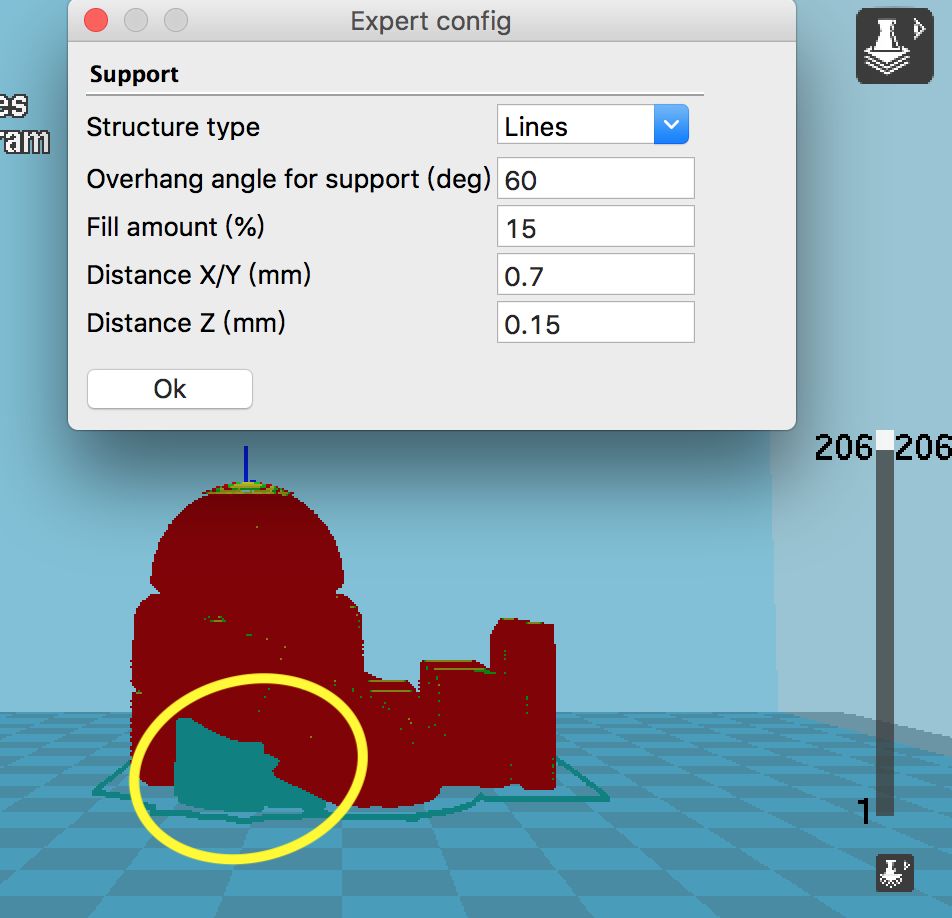
同时还需要注意的一点是支撑,就像下面的黄色圆圈区域中显示的那样。绿色部分是机器人手臂的支撑,如果数值不合理我们还可以在对话框中更改细节。
最后保存代码文件,然后将其保存在SD卡中,在将SD卡插入3D打印机中。

然后通过3D打印机操作面板选择要创建的文件。

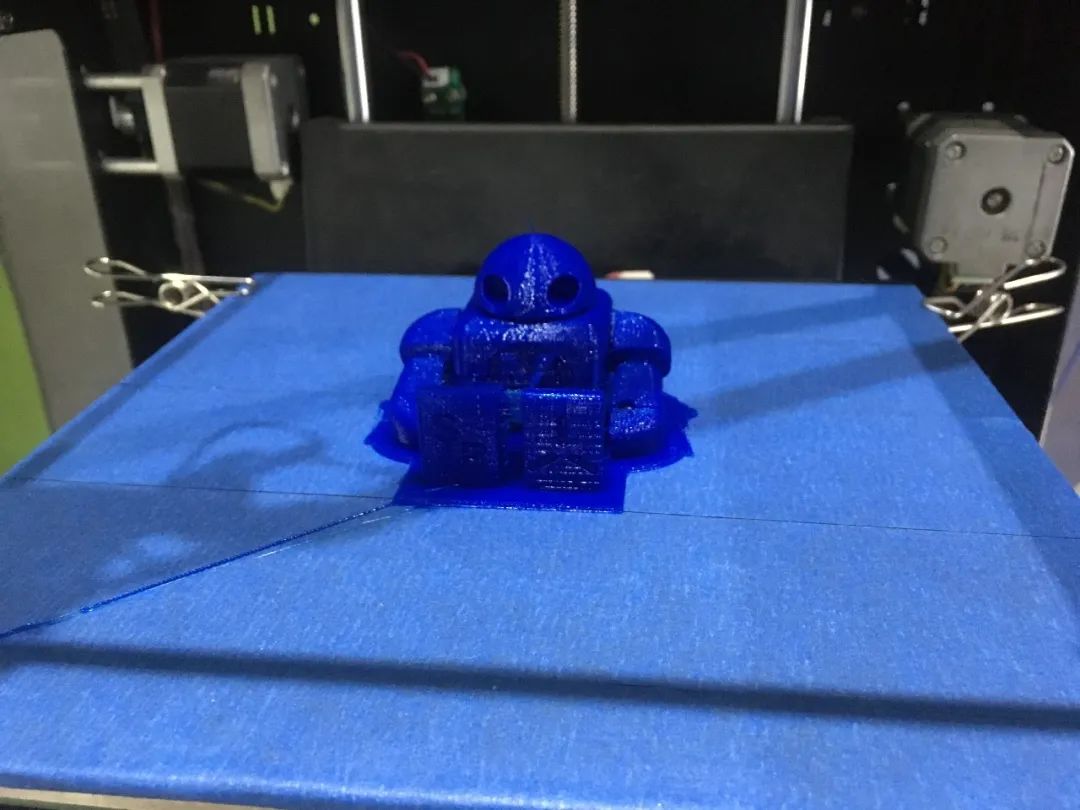
接下来是等待打印结束,时间约为3小时。
2.设置并打印我的ROV项目
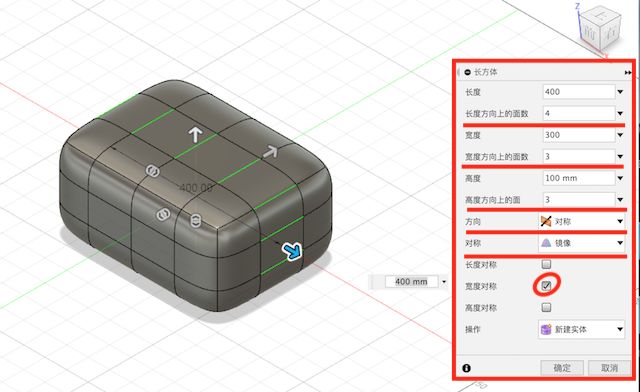
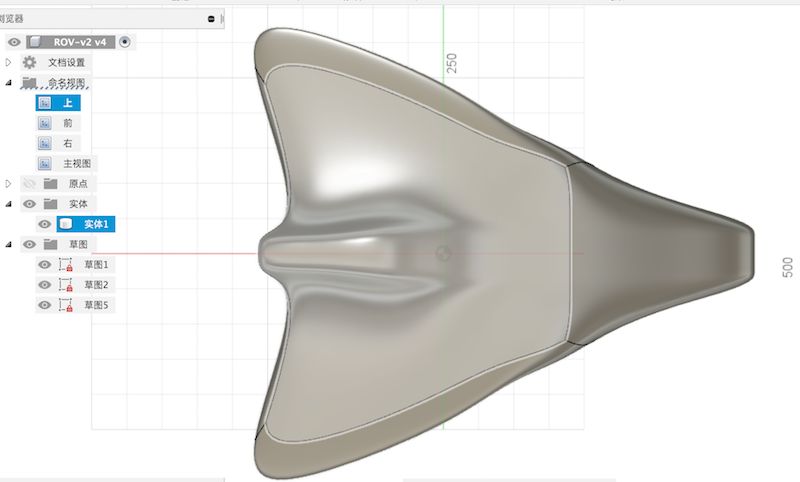
使用命令“创建表格”创建一个框并设置直径,重要的参数是宽度面/高度面/对称/宽度对称。
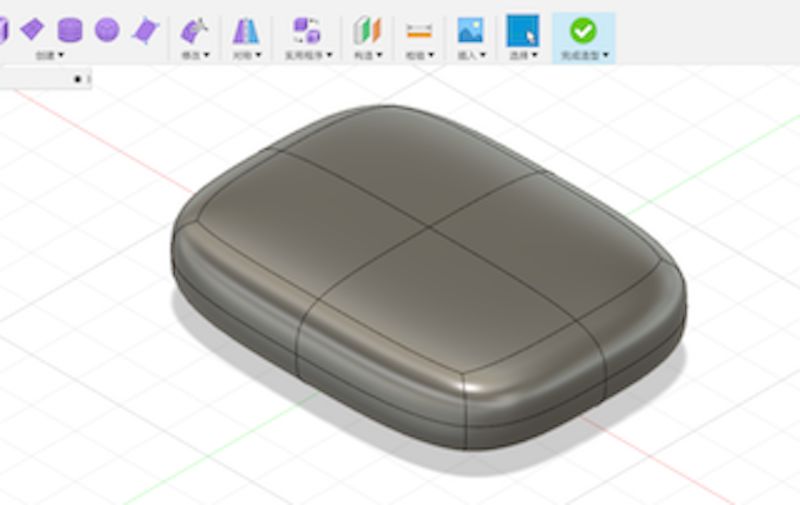
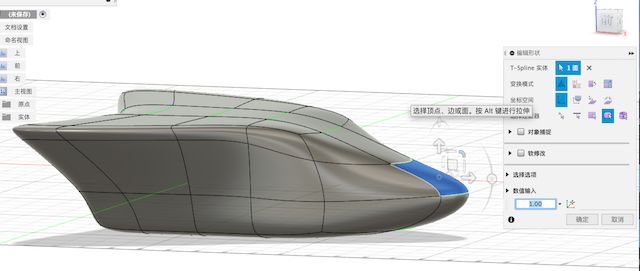
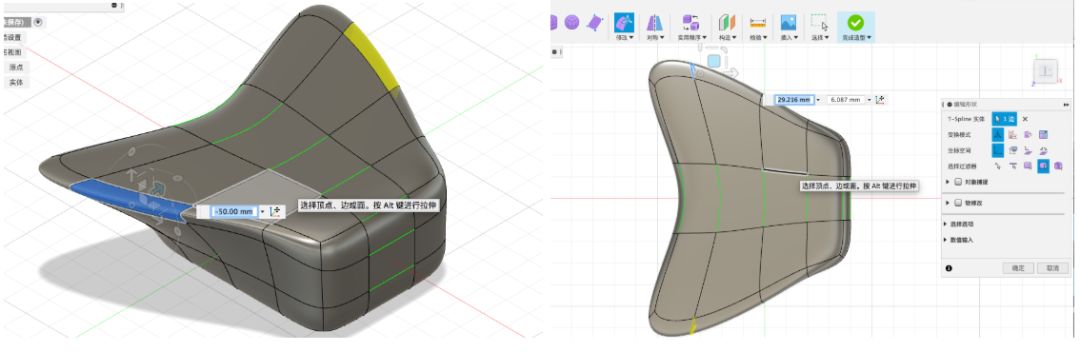
在“修改”下方,有一个“编辑表单”的命令。通过此工具可以更改选择的零件形状。
下一步,我将为ROV的电机增加三个孔。
为直径100mm的圆创建一个新草图,在300mm处挤出圆。使用mirror命令在中心创建相同的对象。
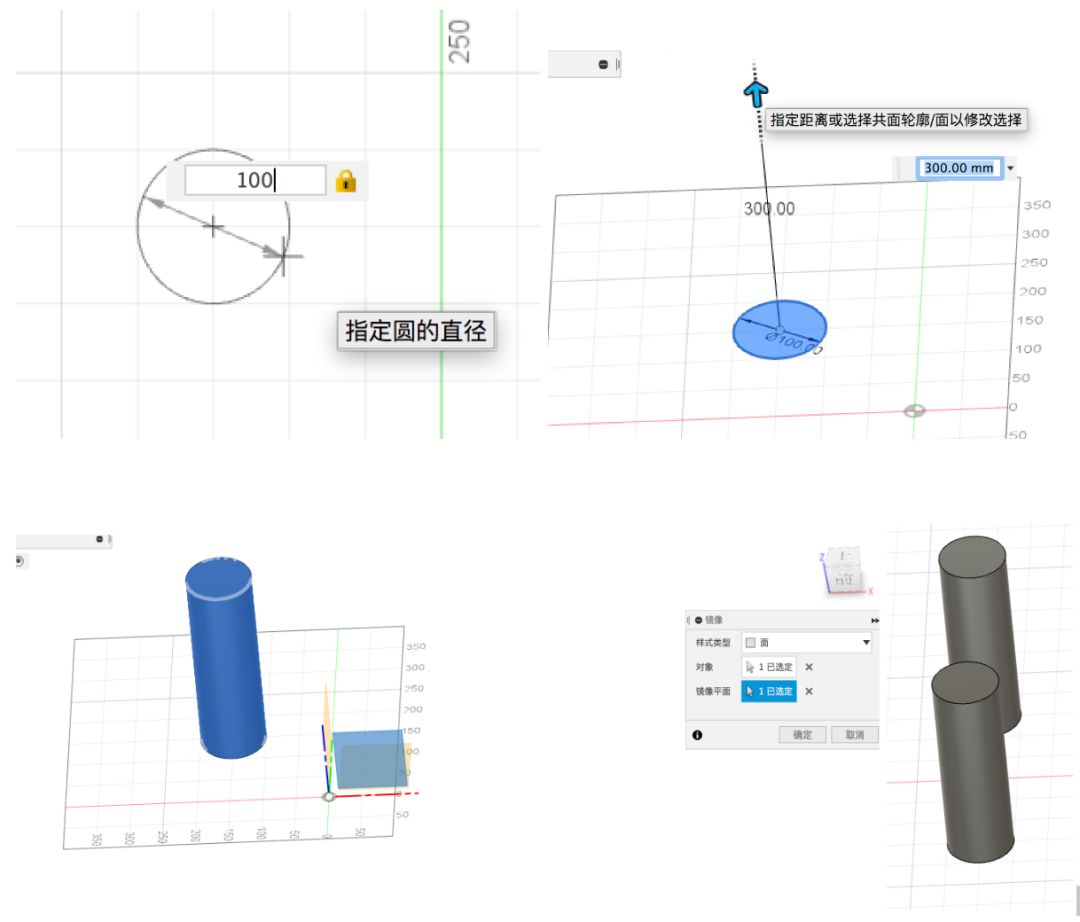
将操作命令更改为“ cut”。然后在ROV主体上创建两个对称孔。
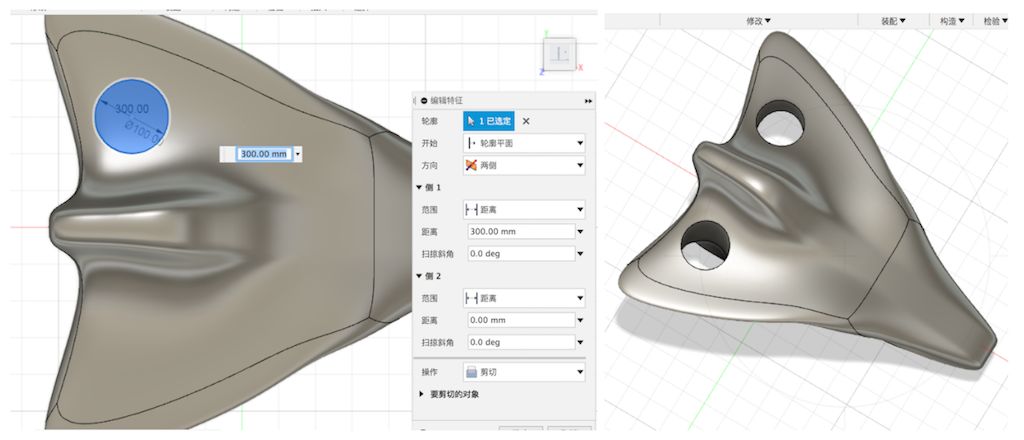
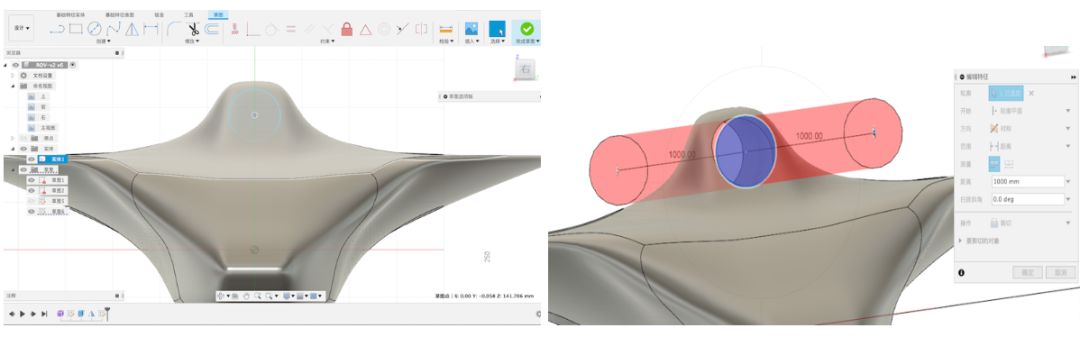
从前视图对对象的顶部进行相同的操作。最后,我们为电机制作了三个孔。
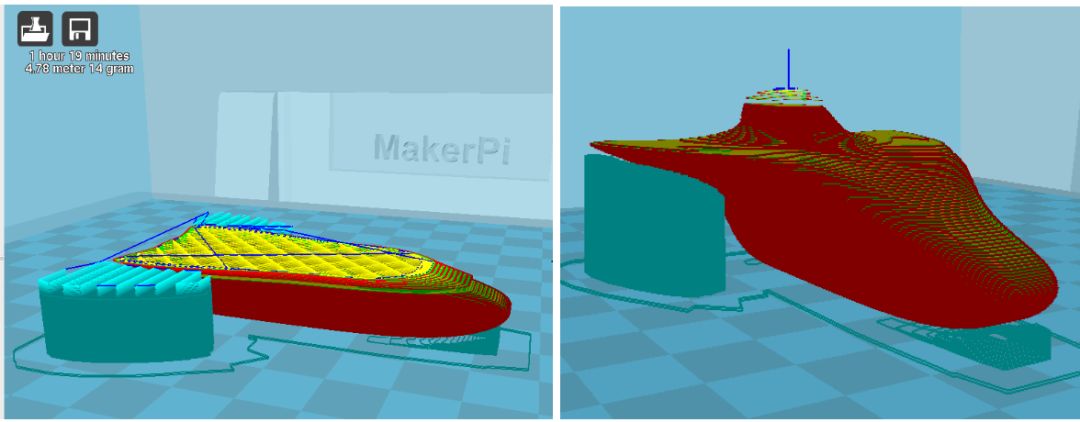
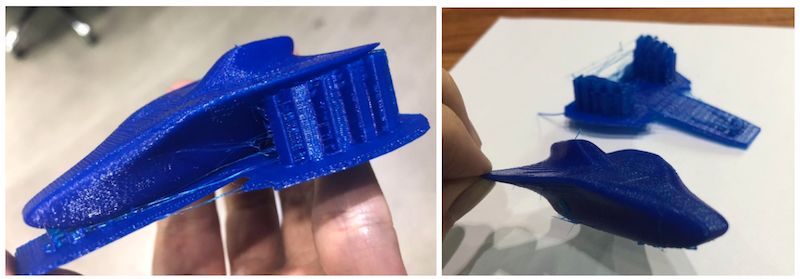
将文档保存到STL文件。

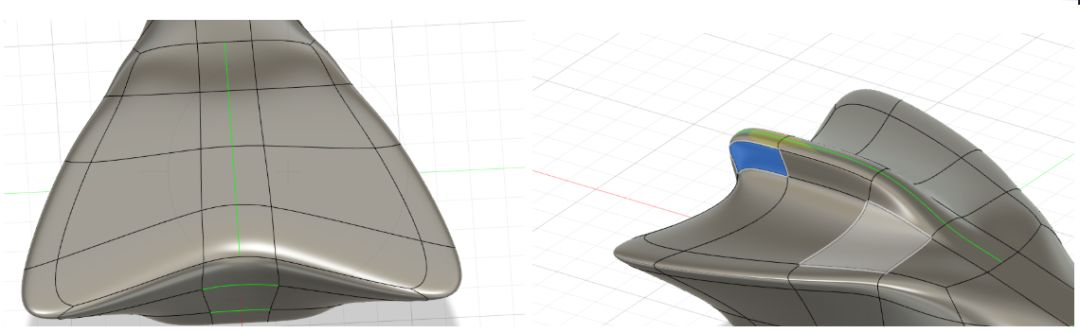
然后,我像之前的操作一样打印了它。由于时间的缘故,本周我只打印了没有电机孔的第一个版本模块。接下来,我将在ROV的原型上做很多工作。对于水和重力,将ROV的形状更改为更合理。
3.3D扫描
之后我将进行3D扫描的工作。实际上,实验室暂时找不到3D扫描仪,因此我联系了广州的实验室中使用3D扫描仪。由于现在的新型冠状病毒,交通不太方便,所以我无法过去使用,因此我只能放上之前制作的简短视频。






