大家好!今天一起来了解一项多功能粘性皮肤——《Versatile adhesive skin enhances robotic interactions with the environment》发表于《SCIENCE ADVANCES》。就像壁虎能在墙上自由攀爬,章鱼能牢牢吸附物体,科学家们受此启发,研发出了这种神奇的机器人皮肤。
传统机器人皮肤功能单一,粘附力要么太强要么太弱,还容易干扰信号。但这款SMP粘合剂皮肤就不一样了,它采用形状记忆聚合物,表面是六边形纤维结构,通过加热控制粘附和脱离,还能传感。在不同模式下,它的粘附强度变化超大,让机器人抓取各种物品都轻松自如。
*
本文只做阅读笔记分享
*
一、研究背景与传统粘合剂局限
在自然界中,动物的皮肤简直就是万能神器。就像壁虎,能在墙壁上轻松攀爬,章鱼能牢牢吸附在各种物体表面,这些都得益于它们独特的皮肤结构和功能。这也启发了科学家们研发智能粘合剂和电子皮肤。但目前机器人使用的电子皮肤却不太给力,大多数只模仿了自然皮肤的感觉功能,缺乏像动物皮肤那样的粘附能力。
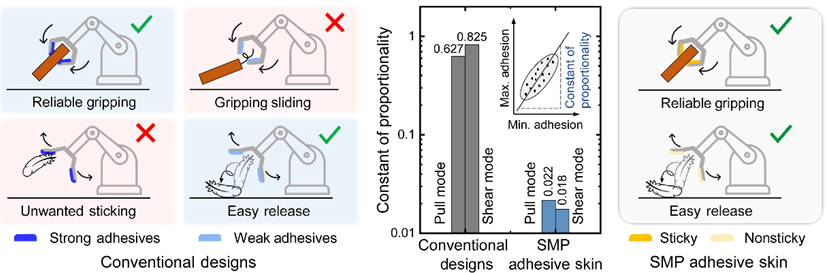
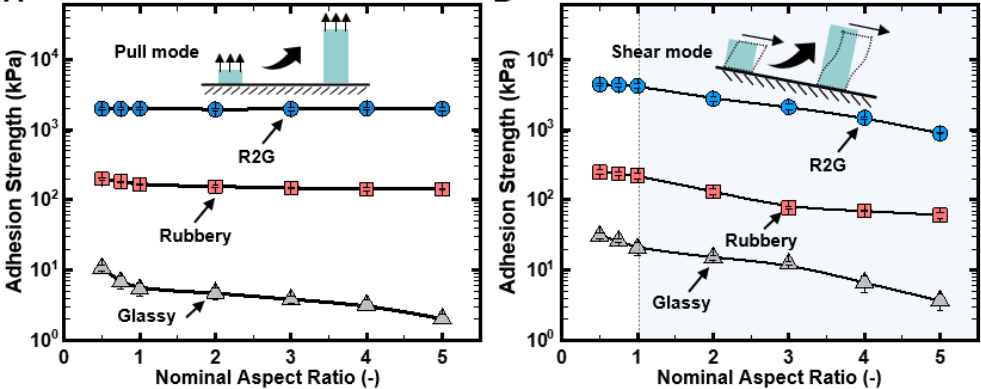
传统的智能粘合剂大多由软弹性体制成,这就带来了一个大问题。比如说,在搬运重物时,需要很强的粘附力,但这种强粘附力在处理轻小物品时就成了麻烦。像抓取布料、纸张或者微芯片时,很容易因为粘附力过大而损坏物品。而且在传感应用中,过多的粘附还会干扰信号检测。我们来看这张图,传统粘合剂的最大和最小粘附强度是相互关联的,比例常数在拉伸和剪切模式下都比较高,这就限制了它的应用范围。
二、SMP粘合剂皮肤的设计与原理
我们的科研团队研发出了一种超厉害的通用型机器人粘性皮肤。它的核心是采用了具有可调橡胶-玻璃(R2G)相变的形状记忆聚合物(SMPs)。这种皮肤的表面层是由类似树蛙天然粘性皮肤附件的结构化SMP纤维组成的。大家看(展示相关图片),这些六边形的纤维结构是不是很特别?它们在不同加载方向上能提供更大的面积填充率和一致的剪切粘附强度,比其他几何形状的设计厉害多了。
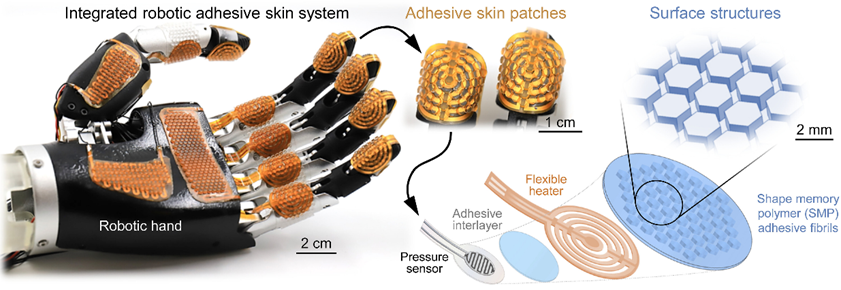
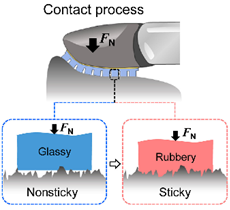
它的工作原理是这样的:通过柔性加热器层来控制SMP的相变,从而实现粘附和脱离的按需控制。同时,还有柔性压力传感器来完成传感功能。当SMP处于玻璃态(温度T<30℃)时,它非常坚硬,根本不会粘附。但当加热到51°C以上进入橡胶态时,它就会软化并与被粘物形成共形接触。一旦冷却回玻璃态,就会实现强粘附,要是再加热回到橡胶态,又能轻松脱离。和传统粘合剂相比,它的最大和最小粘附强度近乎相互独立。从这张图(展示图1A)能明显看出,在拉伸和剪切模式下,比例常数分别降低了29倍和45倍,这就让机器人在面对各种复杂环境时更加灵活自如。

三、SMP粘性纤维的特性与优化
对SMP粘性纤维进行了深入研究。制作的是六边形柱状(边长a = 1mm,不同纵横比)的纤维。通过系统的拉脱和剪切测试,对它们在拉伸和剪切模式下的玻璃态粘附、橡胶态粘附和R2G粘附进行了全面表征。
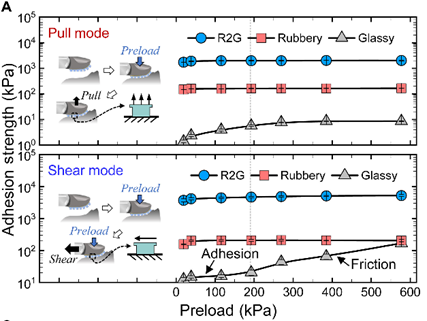
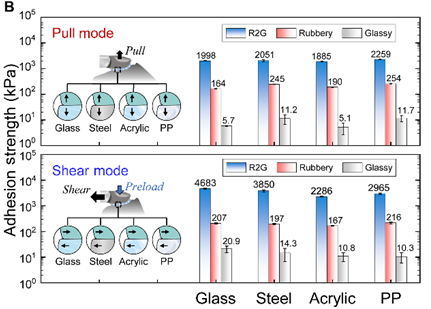
先看预载对粘附强度的影响,在两种模式下,R2G和橡胶态粘附力在约38.5kPa预载时就会饱和。R2G粘附力在拉伸模式下约为2.0MPa,剪切模式下约为5.1MPa;橡胶态粘附力在拉伸模式下为164.4kPa,剪切模式下为206.9kPa。这个粘附力和预载的比值相当高,远远超过了现有的干粘合剂和其他仿生设计,这就使得机器人手能够可靠地抓取各种物品,从脆弱的鸡蛋、蛋壳到沉重的钢球都不在话下。
再说说纤维纵横比的影响。在拉伸模式下,R2G粘附力不受纵横比影响,但橡胶态和玻璃态粘附力会随着纵横比增加而略有下降。在剪切模式下,当纵横比小于1时,变形以块剪切为主,粘附力对纵横比依赖有限;可当纵横比超过1时,就会因为梁弯曲变形导致粘附力迅速下降。所以综合考虑,选用了纵横比为1的纤维,这样就能确保在拉伸和剪切模式下都能保持良好的R2G粘附力。
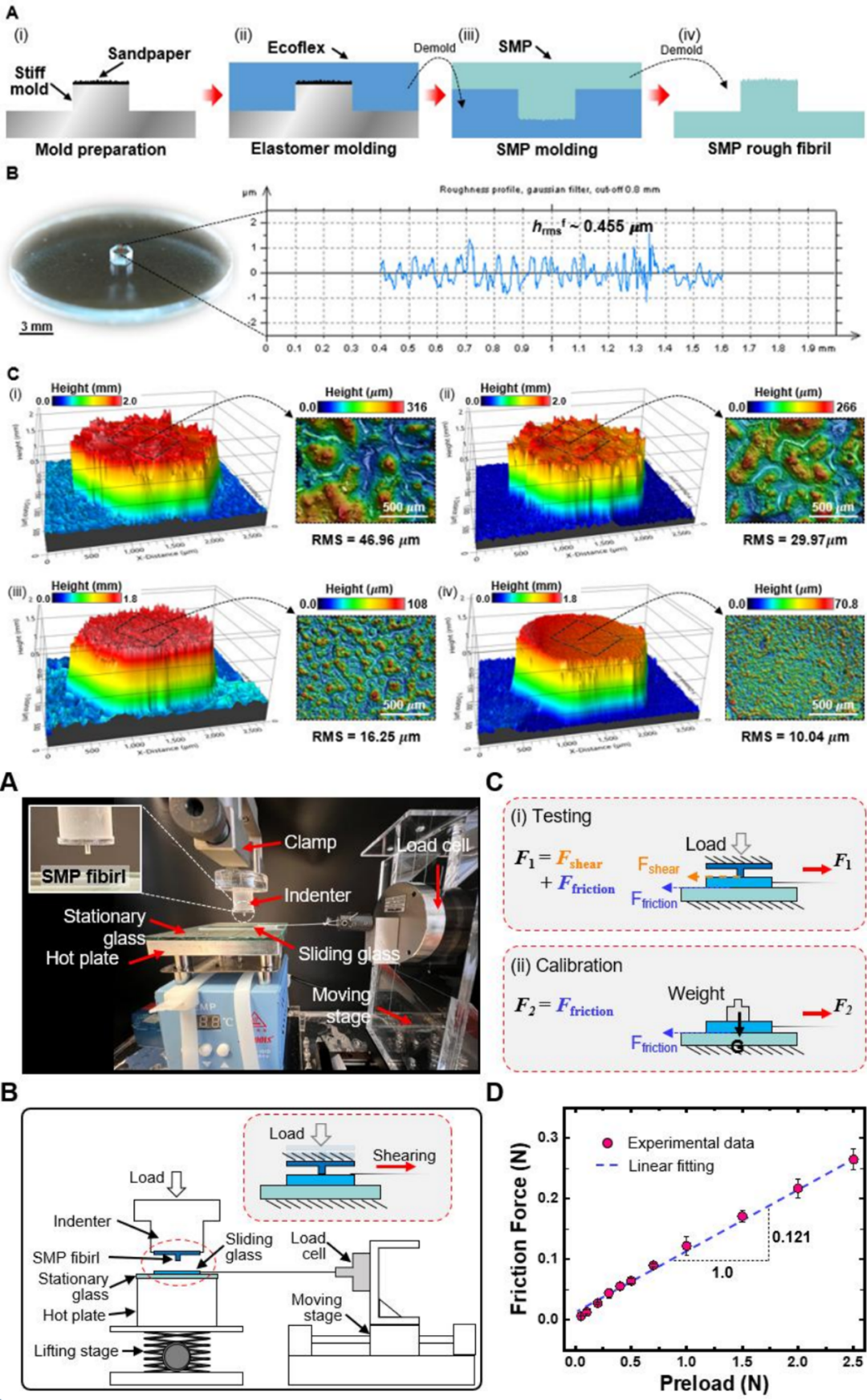
还有表面粗糙度也很关键。SMP对不同表面如玻璃、钢、丙烯酸和聚丙烯等都有很好的适应性,在所有表面上R2G粘附力均超过1MPa。
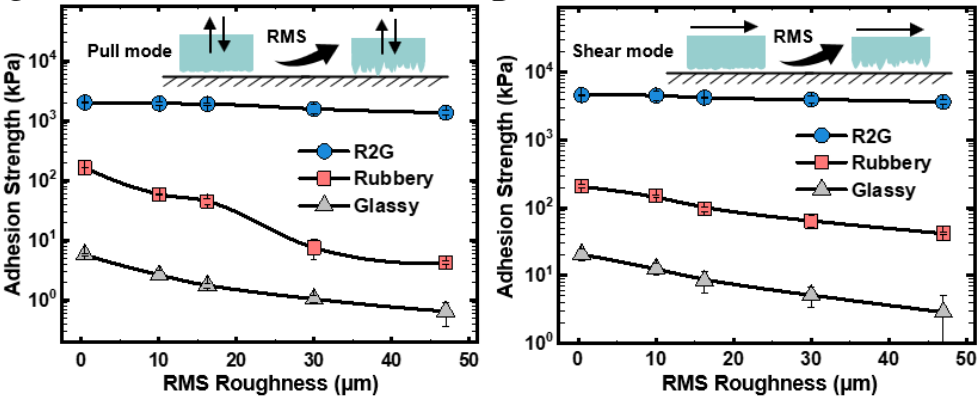
通过在SMP纤维尖端引入表面粗糙度,发现可以在不影响R2G粘附力的情况下降低橡胶态和玻璃态粘附力,这样就能轻松实现粘附力的按需切换。而且由于SMP出色的形状记忆性能,这些微粗糙度结构可以完全恢复并重复使用。
四、SMP纤维的按需粘附与脱离机制
SMP纤维的模量在不同相态下的变化是实现其神奇粘附功能的关键。它的模量跨度可达三个数量级,这就使得它能在不同相态下按需粘附和脱离。在玻璃态时,SMP坚硬(E’2GPa)且不粘附,这种特性在一些需要低粘附或无粘附的应用场景中非常实用。当加热到橡胶态时,SMP软化(E’1MPa)并形成粘性接触。
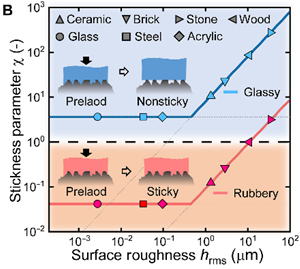
通过研究SMP纤维与常见基底在近零负载下的粘附相互作用,发现了一个有趣的现象。根据粘性参数
χ
可以判断粘附状态,当
χ > 1
时,纤维不粘附,根本形不成有效的接触面积,粘附力几乎可以忽略不计;而当
χ < 1
时,纤维就会变得粘附,即使在很小的预载下也能形成有限的接触面积,在拉脱时就能测量到明显的粘附力。从这张粘性图可以看出,在玻璃态下,SMP纤维对所有基底都是不粘附的(
χ > 1
);在橡胶态下,除了高度粗糙(h
rms
= 34.39
μ
m)的木质表面外,对大多数表面粗糙度(h
rms
)达10.91μm的基底都是粘附的(
χ < 1
)。
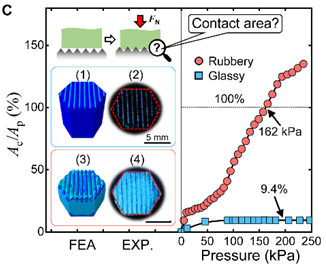
对于粗糙基底,最强的粘附当然是通过R2G条件实现的。我们用六边形SMP纤维(边长5mm,高10mm)和高度粗糙的钢板(振幅0.5mm,波长1mm)进行接触测试,通过有限元分析和荧光涂层接触测试发现,在足够高的预载下可以实现共形接触,并且在R2G转变时能够保持这种接触状态。这都多亏了SMP的形状锁定效应。
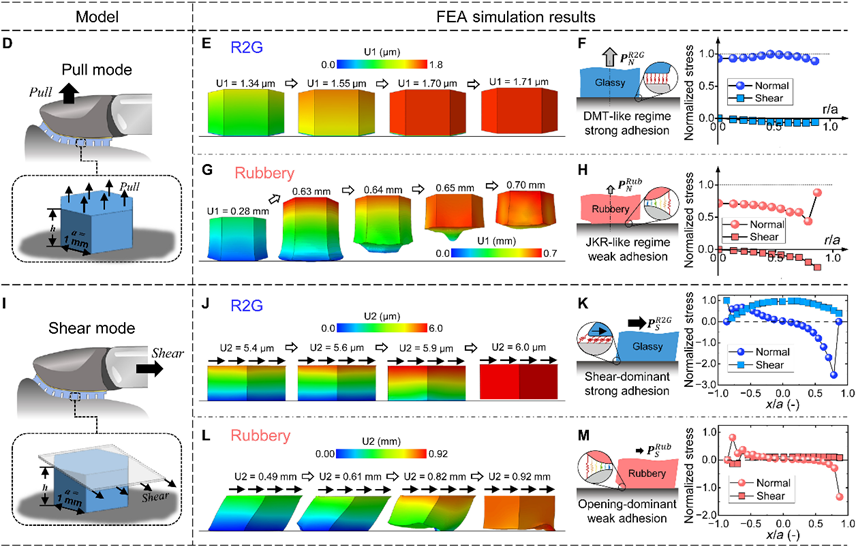
这种粘合剂皮肤还有一个超厉害的地方,就是它能轻松从强粘附(大约兆帕级)切换到弱粘附。它的粘附切换比(最大粘附强度与最小粘附强度之比)在R2G条件下超过102。通过有限元分析模拟SMP纤维在拉伸和剪切模式下的脱离机制,在拉伸模式下,R2G粘附类似DMT行为,纤维会均匀脱离,界面应力均匀分布;而在橡胶态时,纤维通过裂纹扩展脱离,导致粘附力较弱。在剪切模式下,R2G条件下剪切应力主导,粘附力强;橡胶态时呈现开口主导的脱离行为,使得剪切粘附力变弱。
五、SMP粘合剂皮肤的应用实例
把SMP粘合剂皮肤集成到机器人手上,进行了一系列超酷的实验。
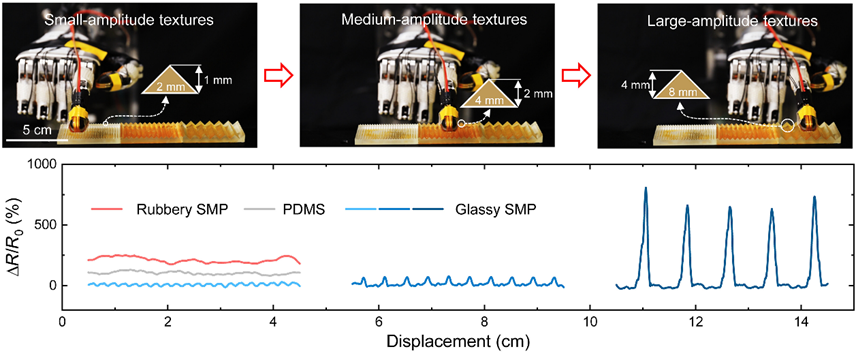
在检测表面形态时,处于非粘性的玻璃态的粘合剂皮肤能让机器人手指顺利滑过具有不同振幅波浪纹理的表面。利用压力传感器可以准确检测表面形态,记录的信号波长和振幅与表面纹理完全一致。但如果是在橡胶态下,或者使用传统的PDMS纤维,粘附就会严重干扰表面纹理的准确检测,记录的信号会出现很多噪声。
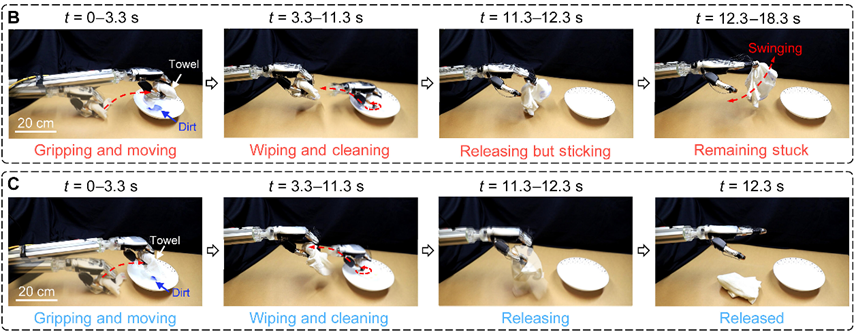
在抓取轻物方面,比如用25g的毛巾清洁盘子时,如果在橡胶态下抓取,毛巾会因为粘附力而紧紧贴在粘合剂皮肤上,怎么都甩不掉,根本无法释放。但要是在玻璃态下,手指的摩擦力就能可靠地抓取毛巾进行清洁,而且在操作完成后,只要打开手指,毛巾就能轻松脱落。
对于易碎物品,像鹌鹑蛋,利用R2G强粘附力,机器人手指可以在最小预载下就牢牢抓住鹌鹑蛋。它的大抓地力与预载比(>50)确保了鹌鹑蛋能紧紧粘附在手指上,并且在加热粘合剂皮肤到橡胶态时能轻松释放。我们的机器人手还能同时操作多个鹌鹑蛋,这可比传统刚性夹具厉害多了,传统夹具在操作过程中很容易把鸡蛋弄破。
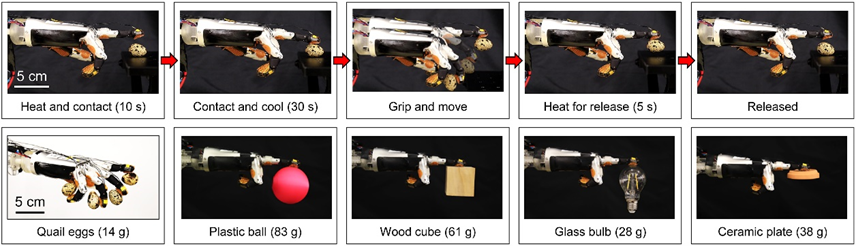
在抓取不同材料和形状的物体时,无论是塑料、木材、玻璃、陶瓷等材料制成的物体,还是半径在10-40cm的空心钢球或平板玻璃等不同曲率的物体,机器人手都能成功抓取。没有粘合剂皮肤时,机器人手连半径为10cm的小钢球都抓不住,但有了它,就像拥有了一双万能的手。把粘合剂皮肤安装在电子手套上,人也能轻松地同时拿起多个物体,或者处理大型光滑的钢球。










