下面的例子是笔者的亲身经历。
飞机
在成都区域由
8400米上升9800米
过程中
遭遇顶风切变,马赫数
最大
增至
.811,后经机组干预恢复正常。
(
B737NG飞机最大马赫数.82。)
第一节
参数变化过程
高高度巡航时,风速或风向改变可能导致超速事件。飞机接近
VMO/MMO 时,虽然自动油门逻辑能提供更有效的速度控制,然而某些情况会超出了自动油门系统的能力,导致飞机短时间超速。
——《B737机组训练手册》(FCTM)
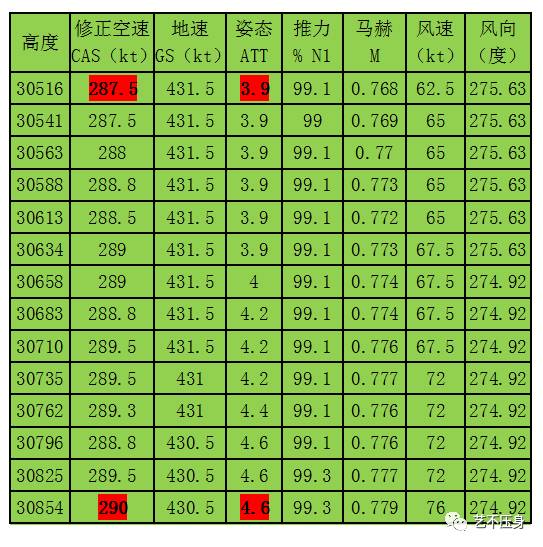
(一)顶风缓慢增加阶段
在
30000-30800英尺阶段,顶风增加相对柔和。
受顶风增加影响,飞机表速出现上升趋势。
自动驾驶逐渐增加姿态,以保持爬升速度(
VNAV SPD方式),飞机爬升率随之增大。
受大爬升率影响,
A/P在31000英尺以下即转为高度截获方式。这给后续的机组处置带来了较大的干扰。
(二)顶风快速增加阶段
在
31000英尺附近,顶风增速加快,马赫数开始显著增加。
机组使用速度插入方式,降低目标马赫数,但自动油门未做响应。(事后推测,可能是由于
A/P进入高度截获方式,但又距离目标高度较远的原因。)
速度插入干预未果后,机组人工将推力手柄收至略高于慢车的位置。(
A/T未脱开。)马赫数最高增至.811,而后逐渐回落。

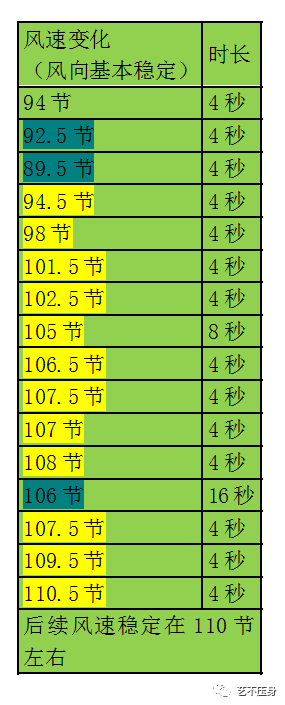
(三)平飞顶风波动上涨阶段
32100英尺保持后,风速还经历了多次波动,最终稳定在110节左右。其间机组多次人工介入自动油门操作。
纵观整个过程,自
30000英尺至32100英尺:
(
1)风向基本稳定。
(
2)风速由52节增加至110节。
(
3)马赫数由.765增至最高.811。
(
4)表速由289节增至最高301节。
(
5)高度越接近32100英尺,风速增加越快。
(
6)飞机爬升率越大,风速增加也越快。
高空风向风速变化,可能诱发飞机超速,是客观存在的气象风险。
一味的强调机组
“及时发现,果断处置”,并不能完全规避该风险;相反还可能造成更为严重的后果。
这一点我们会在后文中详述。
第二节
超速的技术性风险
(一)结构强度损坏
VMO 是结构极限,以及最大的操作指示空速。
从海平面到
VMO 与MMO 恰好相同的高度之间,VMO 是一个恒定的空速。MMO 是这一高度以上的结构限制速度。
——《B737机组训练手册》(FCTM)
VMO/MMO 是验证的飞机最大操作速度,不应有意超出。然而,机组偶尔会因疏忽超速。飞机进行过VMO/MMO 以上的试飞,证明柔和的操纵输入可以让飞机安全地回到正常飞行包线。
——《B737机组训练手册》(FCTM)
训练手册的这两段描述,概括了
VMO/MMO的两大特点。
第一,
VMO/MMO是机组空速操作的上限,其目的是保护飞机结构。
第二,
VMO/MMO的设定留有足够的意外冗余度。
飞机意外的,小幅度的超过
VMO/MMO时,只要机组处置正确,不会造成紧迫的结构损坏威胁。但是机组着陆后
必须
填写《技术记录本》,告知机务部门进行检查。
(二)操纵响应的变化
在高空、高速环境下,空气的压缩特性开始体现。
此时表速已经无法准确反应飞机气动性能的变化。所以我们使用马赫数作为主控飞行参数。
随着飞机逐渐由亚音速飞行(
M.30-.80),进入高亚音速飞行(M.80-.90),气动性能的变化也越来越明显。
尤其是机翼局部气流超过音速,并出现激波后,空气阻力增加,升力中心后移(此时飞机仍为亚音速状态。)。飞机气动性能会发生显著改变。
飞机最早触发机翼局部激波的马赫数,即被称作
“临界马赫数”。
在空客
320和C919飞机上,采用了针对性修形的“超临界机翼”。该翼型可以延缓机翼局部激波的出现,并减小激波强度,提高飞机的临界马赫数。
但是很遗憾,波音
737系列飞机(CL、NG、MAX)并未采用该翼型。
波音手册并未给出
B737飞机的临界马赫数值。但是FCOM介绍,当马赫数超过.615后,B737飞机的马赫配平开始动作,重新调整驾驶杆定中位置。
飞机在高空高速条件下的操纵特性,与低空低速状态存在极大的差异。
机组应当对此保持足够的警觉。
在高空高速状态下,如果机组盲目套用低空低速飞行经验操纵飞机,则可能导致飞机状态的意外的剧烈变化。
当出现无意识的超速时,除非自动驾驶仪明显不能纠正超速,否则机组应保持自动驾驶接通。但是,如果需要人工输入,脱开自动驾驶仪。应注意的是,为了避免或减轻无意识超速而断开自动驾驶,可能导致俯仰突然改变。
——《B737机组训练手册》(FCTM)
(三)发动机推力响应滞后
高空环境空气密度低,涡扇发动机的最大推力、加速性、稳定工作余度,以及喘振余度均有大幅度的削弱。
此外,
EEC还会主动限制推力变化速率,以避免熄火或喘振。
在本次案例中,发动机加速和减速的滞后十分明显。
(
1)机组保持油门杆慢车(略高)6秒后,N1转速仅由99.3%降至78%。
(
2)随后机组前推油门,而N1转速继续下降4秒后才开始回升。
(3)
油门杆角度稳定
5秒后,N1方达到与油门杆匹配的转速。
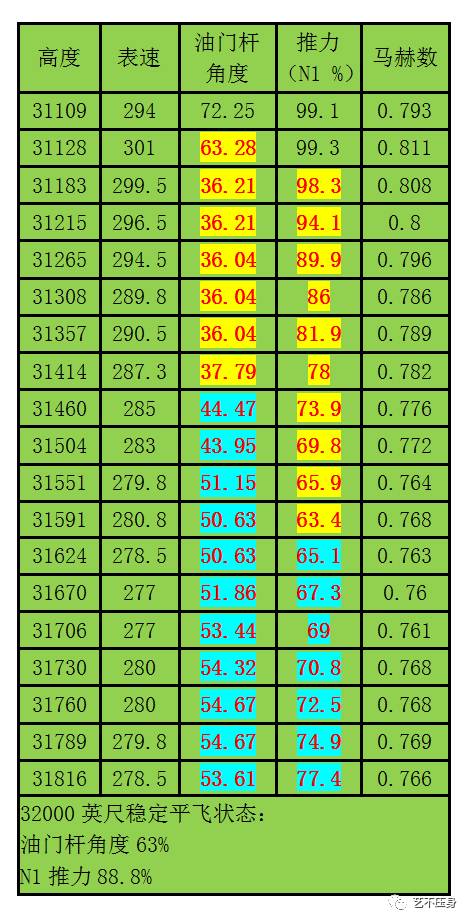
事实证明,对于短时的,一过性的意外超速,收油门几乎没有起到任何正面效果。
反倒是推力减小后,发动机加速缓慢导致了明显的低速偏差。
如果说收油门发动机减速迟缓,是
EEC保护所致的话;那么加油门发动机增速缓慢,则是发动机性能衰减与EEC保护双重作用的后果。
在高迎角,大阻力的状态下,发动机加速迟缓,很可能会导致飞机在超速之后,随即进入失速。
相较于发动机推力的迟缓响应,由液压驱动的减速板,对飞行状态的介入和退出更加快速和直接。
如果在高高度巡航时改出超速,避免收油门到慢车,否则会导致发动机回到巡航推力时加速缓慢,并且可能导致对速度的过度控制或是掉高度。如果自动油门的修正不令人满意,缓慢放出部分减速板,直到空速获得明显的减少。
当空速低于
VMO/MMO 时,以减速板放出时的速率收起减速板。推力手柄应该缓慢前移以获得巡航速度;如果没有,快速前推。
——《B737机组训练手册》(FCTM)
第三节
超速的
“非技术”风险
在处置过程中,还发生了这样一个小插曲。
左座新机长试图断开自动驾驶,增加姿态减速,被我阻止了。
事后,我们就此发生了长时间的争论。
“左座”认为:
当时最紧迫的威胁是飞机超速。
A/P处于高度截获方式,持续减小姿态;A/T维持爬升推力不减小。其情形符合手册中“自动驾驶仪明显不能纠正超速”时的处置条件。
机组应当断开自动驾驶,收油门同时,人工增加姿态,尽快抑制超速倾向。
笔者认为:
贸然转为人工操纵极易操纵过量。飞机状态突然的、剧烈的变化可能导致客舱人员伤亡。
机组应当首先考虑使用减速板。在增加阻力的同时,减速板还会破坏升力,自然促使
A/P增加姿态。
左座:
“在这个问题上,我绝对比你更有发言权。
我以前在老东家当副驾驶的时候,曾经碰到过高空超速。当天的机长还是一位领导。机长确实采取措施了,但是没能阻止超速警告。
落地以后,这位领导就被一撸到底了。
”
笔者:
“我有一位师兄,高空遇到RA警告。由于操纵过猛,导致乘务员摔伤骨折。结果他被停飞了3年。
如果以五边或着陆的操纵量衡量,他的动作幅度并不算太大。
你我都没有接受过系统的,高空高速条件下的人工飞行训练。这样做伤人的风险是很高的。
”
左座:
“你所说的后果,只是人工操纵过量时,存在的一种可能性。只要操纵足够柔和是可以避免的。而超速触发警告,是已经迫在眉睫的威胁。
为了规避一种可能的危险,去触发超速警告,我认为是不值得的。
”
笔者:
“如果以飞行员的前程和职业生涯作为衡量标准,我必须承认,你这笔账算得没错。
但是如果以飞机和人员的安全作为衡量标准,冒客舱人员伤亡的风险,去制止短时超速,是得不偿失的。
短时的意外超速,只要机组处置得当,不会对飞行安全构成紧迫威胁。而空中高过载伤人,哪怕是万分之一的可能,也是无法接受的。
”
最终,我们谁都没能说服谁...
巧合的是,就在我们争论后不久,
“左座”的老东家发生了一起高空颠簸伤人事件。
笔者并不清楚事件的具体情况,所以不敢妄作评论。
但事件简报中,我们确实看到了
“超速警告”、“断开自动驾驶”、“油门杆多次收加”、“双侧杆输入”、“动作量偏大”等等一系列熟悉的关键词。
在一次关于
“预防空中失控”的研讨会上,笔者向与会的专家们介绍过本次临近超速的经历,并且提出了我和“左座”的分歧。
一位在场的H航领导介绍了他们公司处理该问题的经验。
“在H航,我们调查空中超速事件有三条标准:
第一,超速与气象原因存在显著的关联。
第二,超速过程中,机组曾经采取过干预措施,例如:调低目标速度,收油门等,以证明你当时没有打瞌睡。
第三,机组没有断开自动驾驶。
只要满足这三条标准,机组免责。










