
文 | 传感器技术(WW_CGQJS)
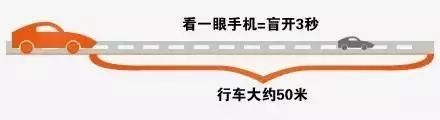
我们都知道,在开车过程中,我们需要不时低头查看仪表盘上的时速、油耗等信息,而这一小小的动作,平均所需时间约为
1-3
秒。以城市道路的平均车速
65
公里
/
时来计算,注意力离开路面
3
秒钟,就相当于闭着眼睛行驶了
54
米。在现实生活中,由于驾驶员注意力分散而引发的交通事故数不胜数。


然而,开车总不能不看仪表盘信息啊,是的,不能不看,但是,我们可以不低头看!本期我们介绍的就是
HUD
汽车抬头显示技术。

HUD
汽车抬头显示技术的由来
HUD
的全称是
Head Up Display
,即平视显示器,最早应用于军用飞机上,旨在降低飞行员需要低头查看仪表的频率。起初,
HUD
通过光学原理,将驾驶相关的信息投射在飞行员的头盔上,使得飞行员能在保证正常驾驶的同时,关注到飞行的各项指标并接收地面传输的信息,提升驾驶的安全性和便捷性。

自上世纪
80
年代,
HUD
开始从飞机嫁接于汽车,但
HUD
真正受到世人瞩目还是在虚拟显示概念被广泛了解的今天。谷歌眼镜激起了对增强现实的无限遐想,
HUD
可谓是“属于汽车的智能眼镜”。应用于汽车的
HUD
要求所产生的投影画面呈现在道路上,而非聚焦于车内或者挡风玻璃上,通过这样的设计,免除了人眼的焦距调整。
设计初期,应用
HUD
的驱动力是驾驶的安全性,使得驾驶员在驾驶过程中无需将视线转移到仪表盘或者中控上,因此,
HUD
所投影的信息主要是汽车的行驶状况指标,比如仪表盘上所显示的车速、油量等信息;进一步,设计人员希望通过
HUD
实现智能驾驶的目标,赋予其更多的功能,包括导航、短信、电话、邮件等,甚至加入简单的互动,让汽车成为类似智能手机的移动终端。

HUD
汽车抬头显示技术的工作原理
HUD
的原理类似于幻灯片投影。由投影仪发出光信息,经过“反射镜”反射到“投影镜”上,再由“投影镜”反射到“挡风玻璃”,人眼看到的是位于眼前
2-2.5
米处的虚像,给人的感觉就是信息悬浮在前方路上。
HUD
图像在挡风玻璃上位置是可调的,而这其中的关键便是“投影镜”,通过改变“投影镜”的角度,就可以调节
HUD
图像的位置。

挡风玻璃是弯曲的,图像若是直接投射在弯曲的玻璃面上,会造成图像变形。这就需要一个纠正措施——于是“投影镜”和“反射镜”被设计成弯曲的。
HUD
利用光学反射原理,可以在挡风玻璃上显示超速预警、车况监控、油耗、时速、防止追尾等信息,能够让驾驶员的注意力集中在前方路面,实现主动的行车安全。
它将行车信息投射到和驾驶员平行视线的前方,避免了因观察仪表而分散对前方道路的注意力,同时降低眼睛焦距需要不断调整产生的延迟与不适。高度与人眼的平视视线处于相似的高度,因此成像在挡风玻璃的中下方,虚拟图像与路面融合度较好,通常可投射至汽车引擎盖前方
1-2
米处。

另外,如今的
HUD
平视显示技术不仅仅只提供车辆的基本行车信息,它可以具备高精度的导航指引和路面信息提示,还能语音收发微信、打电话、点歌等。

大家试想一下,有多少交通事故是因为司机低头看了一眼手机而造成的,而
HUD
恰好能解放你的手机,安全性大大提高。
HUD
汽车抬头显示技术能够显示的信息

当前车速。
它是
HUD
最基本的信息,在限速摄像头无处不在的城市道路上,掐着最高限速开车时或者摄像头前减速时,这个信息就显得尤为重要了。
导航信息。
这个是很实用的信息,尤其是在市内车多、路杂导航时效果显著。
红色故障标记
红色故障灯出现,意味着车子开起来会有很大的安全隐患。
驾驶辅助信息
如限速显示、主动车道保持信息、巡航信息等,在使用车上高科技并进行调节的时候,这些信息可以显示在
HUD
上,使得驾驶员不必低头看仪表进行调节。
HUD
汽车抬头显示技术的优点
1
、
HUD
信息显示位置比传统的组合仪表位置高。也就是说,驾驶员想查看车辆信息时,通过
HUD
只需低下头
5-10°
;而看组合仪表的话,则需低
20-25°
。

2
、驾驶员从组合仪表上查看驾驶信息时,眼睛从道路转移到组合仪表再转移到道路,由于道路亮度高而组合仪表(车内)的亮度低,眼睛就会经历由亮到暗再到亮的过程,眼睛瞳孔会进行调整;同时眼睛的聚集点会由远到近再到远。而驾驶员从
HUD
上看信息时,眼睛就不需要这么折腾了。
以上两个方面综合起来,驾驶员使用
HUD
,可以减少视线转移的时间、视线转移带来的眼睛瞳孔变化、眼睛聚集点的变化,最终结果就是驾驶员的视线和注意力更少的偏离道路,提升行车安全性。
HUD
汽车抬头显示技术的实现方案
当前的
HUD
实现方案主要三种:
1
、直接将前挡风玻璃作为显示屏
该种实现方案多属于前装方案。代表产品是捷豹路虎公司在
2014
年
7
月开发出的汽车虚拟风挡
HUD
概念技术,可以直接在风挡上显示车内参数以及行车路线。就像在玩现实版的
GT
赛车或
Forza
一样,该系统甚至能够显示纪录你在之前相同跑道开过的幽灵车影。并能借助手势操控汽车的各种功能。
2
、通过一块附加的显示屏实现

该种实现方案属于后装方案。
2014
年推出的
Nandy
便是该种方案下的明星产品。
3
、利用前挡风玻璃反射实现
该种方案也属于后装方案,产品主要通过手机
APP
实现,利用手机屏幕在前挡风玻璃上的倒影实现
HUD
功能。代表的产品有:百度地图、图吧地图、高德地图、
Navier HUD
、
aSmart HUD 3D
、
Awesome HUD
等。
通过前挡风玻璃反射实现的产品主要有四个劣势:
清晰度差:通过手机屏幕投影的像都是利用物理的反光原理,更容易受到环境中光线的影响,不能在较强的外光条件下实现显示效果;

信息量小:由于手机和汽车是独立的,没有实现有效的互联,只能将手机自身具备的功能信息进行显示和投影,并不能兑现
HUD
最初的安全驾驶目标;
立体感差:手机屏幕的投影相比与
HUD
产品在成像的真实感和立体感上相比都相差甚远;
适应性差:手机长时间置于仪表盘上进行投影,不利于散热,会对手机造成损害,同时利用手机投影的能耗较大,会缩短手机的带电时间。
因此,利用手机软件实现的
HUD
模式的实用效果差,更多的只是一种好奇者的尝试,并不能真正满足当前对于
HUD
功能的定位。
HUD
汽车抬头显示技术关键点
1
、成像距离和显示亮度是关键
评价
HUD
成像效果的最关键指标是成像距离。
HUD
的本质是为了提高人们的驾驶安全系数,进而才是提高驾驶的智能性,提供全新的驾驶体验,因此
HUD
的成像一定要置于道路上,从而使人们在不用进行频繁的焦距变换条件下,阅读所显示的信息。
2
、其次是视角问题
视角受到显示亮度局限,由于汽车所处环境的复杂多变,对于显示亮度的要求就很高,既要清晰又要不刺眼。
3
、成像技术的升级
最基础的
HUD
产品是通过
LED
灯进行成像,其成本较低但灵活性及显示效果较差,后续微型激光投影技术逐渐应用于
HUD
成像,在成像距离和显示亮度这两个指标上有明显的改善。单纯从更好的实现
HUD
的功能目标而言,激光投影技术是大趋势。
微型激光投影技术自出现至今已经经历了
3
代:
CRT
,阴极射线管,
CRT
纯平显示器具有可视角度大、无坏点、色彩还原度高、色度均匀、可调节的多分辨率模式、响应时间极短等
LCD
显示器难以超越的优点。这种成像方式对于周围光照和温度变化的适应性较差,不适合在汽车上使用。
DLP
,
DLP
技术是指数字光处理技术,也就是说这种技术要先把影像信号经过数字处理,然后再把光投影出来。其核心是一个微镜阵列此类状态由运行期间微镜下方内存单元所存放的数据所决定。微镜表面由具有非常高反射率的铝金属制成,当有一束外部光照射到微镜上时,微镜的两个偏转状态会将光反射偏转到不同角度上。但是这种技术在晃动条件下会导致
RGB
的光重叠效果变差,会产生较严重的色变。其次,
DLP
投影技术中
DMD
芯片容易受控制器的影响,产生坏点。而且,长期的使用会导致
DLP
中色轮的玻璃薄片结构产生间隙,导致色轮松动。各种问题的出现证明了
DLP
技术并不是长期的选择。
LCOS
,
LCOS
是硅基液晶,是一种基于反射模式,尺寸非常小的矩阵液晶显示装置。这种矩阵采用
CMOS
技术在硅芯片上加工制作而成,像素的尺寸大小从
7
微米到
20
微米,百万级的像素分辨率来说,这个装置的大小也才有
1
英寸。
LCOS
的呈现的数据容量比
DLP
技术所呈现的数据容量要大很多。
LCOS
技术的应用对于
HUD
的改善会有积极的促进作用,会更加有科技感。
HUD
汽车抬头显示的关键部件
投影单元
投影单元内部集成了投影仪、反射镜、投影镜、调节电机及控制单元,
HUD
控制单元从车上数据总线获取车速、导航等信息,并在投影仪输出图像。
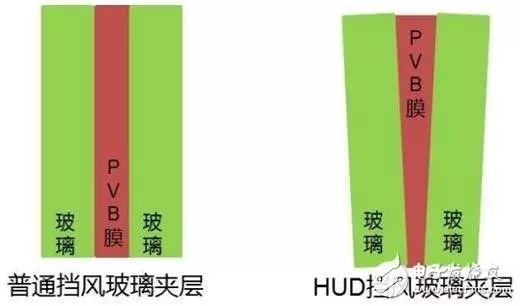
挡风玻璃
大家可能会想,这挡风玻璃有啥特殊的?的确,下面左图是普通挡风玻璃夹层结构示意,如果把
HUD
图像投射到普通挡风玻璃上,很容易形成图像重影,投射效果差。
而
HUD
挡风玻璃夹层内部的
PVB
膜呈楔形,即玻璃呈上厚下薄的状态,这样就不会形成图像重影。
从这里也可以看到,为了降低玻璃成本,在大多
A
、
B
级车上搭配的
HUD
系统的,会另外配备一块反射玻璃,而在大多豪华品牌上,成本限制没那么紧张,就会用
HUD
挡风玻璃。
HUD
汽车抬头显示的技术趋势
3D HUD
是未来

在
2014
年
9
月,丰田位于加州的设计团队研制了出了
3D
的
HUD
显示,可以实现裸眼观看
3D
影响,这一进展使得
HUD
显示的信息更加丰富、直观。相较于大众化的平面显示,
3D
效果能够在保证
HUD
实现驾驶安全性这一初衷的基础上,将实时信息与显示进行更好地匹配、结合,从而实现增强现实的功能。比如,丰田
3D HUD
还可以显示附近可用的停车场,并且估计抵达所用的时间。目前,这套系统已经研发了
2
年时间,主要数据来源于三个传感器,雷达负责采集车速、位置信息,摄像头捕捉路面信息,
LiDAR
传感器确定路面物体或十字路口。
利用
OBD
信息,全面整合
OBD
盒子
OBD
(
On-Board Diagnostic
)全称是车载诊断系统,现在市场上很多
HUD
设备都需要连接
OBD
接口,从
OBD
接口中可以获得汽车油耗、胎压、转速等基本信息,这也是
HUD
设备所必需的基本信息。目前市场上所推出的
OBD
盒子,作为车联网的基础设备,它可以收集车辆数据并通过与云端的交互进行数据分析,甚至有些产品可以实现导航、远程诊断等功能。
但是
HUD
对于显示信息内容的要求就意味着其也要通过
OBD
接口获取信息并进行处理,其核心也是
OBD
芯片,所有的数据解析方式和
OBD
盒子也基本相同。随着对
HUD
设备功能多样化、智能化的要求,在显示端的后台完成数据的分析处理、定位导航、联网诊断等功能就成为必然。这也就表明,
HUD
将全面整
OBD
盒子的功能。相较于










