

SLAM 全称 Simultaneous Localization and Mapping,中文名曰「同步定位与地图构建」,主要用于解决机器人在未知环境运动时的定位和地图构建问题。
作者 | OD
当你身处一个陌生的地方,要准确找到目的地和路线,十有八九会打开手机上的地图 app,然后定位、输入目的地、规划路线、导航。
机器人也一样。当它们身处未知环境时,同样需要通过以上步骤才能做出正确的运动。只不过,机器人靠的不是手机地图 app,而是 SLAM 技术。
SLAM 全称 Simultaneous Localization and Mapping,中文名曰「同步定位与地图构建」,主要用于解决机器人在未知环境运动时的定位和地图构建问题。这更像一个概念,而不是某种算法。它本身包含许多步骤,其中的每一个步骤均可以使用不同的算法实现。
机器人、无人车、无人机、AR,无所不能的 SLAM
两年前,SLAM 最流行的应用场景还只是我们家里的扫地机器人。近几年,随着无人机、无人驾驶、服务机器人、仓储机器人以及 AR 的兴起,SLAM 作为其中核心技术的一种,正变得越来越重要。

雷锋网的一篇报道曾引用 SLAM 技术发烧友 Guang Ling 的话,来强调 SLAM 技术的重要性:
一个机器人也好,无人汽车也好,其中最核心,最根本的问题有四个,定位技术、 跟踪技术、 路径规划技术(Path Planning), 还有就是控制技术(Controlling)。
而这四个问题中的前三个,SLAM 都扮演了最核心的功能。打个比方,若是手机离开了 wifi 和数据网络,就像无人车和机器人,离开了 SLAM 一样。
也许有读者好奇,为什么无人车也非常依赖 SLAM?因为无人车被看作移动机器人的一种,也需要首先解决定位、避障和导航的问题。目前用在无人驾驶汽车上的 SLAM 主要是基于激光雷达传感器,后面会详细提到。

天上飞的的无人机同样需要 SLAM 来「添翼」。SLAM 能让无人机知道障碍物在哪里,进而实现自动避障的功能。
香港科技大学助理研究员徐枭涵曾在知乎上如此形容 SLAM 对无人机的重要性:
所有的关于无人机的梦想都建立在 SLAM 之上,这是无人机能飞(具有定位,姿态确定以后)的时代以后,无人机最核心的技术。也是现代无人机和玩具的区别。

无人车、无人机,都可以算作机器人的一种,依赖 SLAM 很好理解。但与机器人没什么关系的 AR 设备,其实也是 SLAM 的一个重要应用。
如果没有 SLAM 加持,所有头戴眼镜就只是一个近眼投影设备。有了 SLAM,AR 眼镜才能知道自己的空间坐标和相对于室内各种障碍物的位置,同时识别出各种室内摆件的形状。这是 AR 设备人机交互的基础。

由于 AR 是将虚拟图像叠加在真实物体上,所以 SLAM 的应用讲究局部精度,要求避免出现漂移、抖动的现象,虚拟与真实才能完美地融合在一起。另外,AR 对帧率、硬件体积、计算量、功率、成本等问题都更敏感。
激光雷达、单目、双目、RGBD,SLAM 传感器的分类
实现 SLAM 的第一步,是选择传感器的形式和安装方式。传感器分为激光雷达和视觉两大类,视觉下面又分三小方向。
激光雷达
激光雷达能以很高精度测出机器人周围障碍点的角度和距离,而且速度快,计算量也不大,容易做成实时 SLAM。激光雷达一般用于扫描一个平面内的障碍物,适用于适用于平面运动的机器人(如无人车、扫地机器人)。
许多行业分析师认为,激光雷达是实现全自动驾驶的关键传感器,其产品被以 Google、百度为代表的企业认可。

不过,激光雷达制造成本高,价格十分昂贵,比如 Google 无人车目前使用的激光传感器单个定制成本在 8 万美元左右,百度采购一台激光雷达也要 70 万人民币。
成本已然成为激光雷达普及最大的拦路虎。2016 年 8 月福特和百度一起投资了激光雷达厂商 Velodyne LiDAR 1.5 亿美元,目的就是帮助 Velodyne 降低激光传感器的成本。Velodyne 希望将激光雷达的价格降到 300 到 500 美元之间,以满足大众汽车市场。

视觉 SLAM
视觉 SLAM 是 21 世纪 SLAM 研究热点之一。CPU、GPU 处理速度的增长和硬件的提高,让许多以前被认为无法实时化的视觉算法,得以在 10 Hz 以上的速度运行。
按照摄像头的数量和种类分,视觉 SLAM 分 3 个子方向:单目、双目(或多目)、RGBD。此外,还有鱼眼、全景等特殊摄像头,但是都属于少数。
单目相机 SLAM 只需要一个普通的 2D 摄像头,成本优势大。但普通 2D 摄像头没法获取深度信息,它捕获的仅仅是一张 2D 图像。深度信息缺失有什么影响?引用
知乎用户「半闲居士」的一个回答
:
没有距离信息,我们不知道一个东西的远近——所以也不知道它的大小。它可能是一个近处但很小的东西,也可能是一个远处但很大的东西。只有一张图像时,你没法知道物体的实际大小(Scale)。
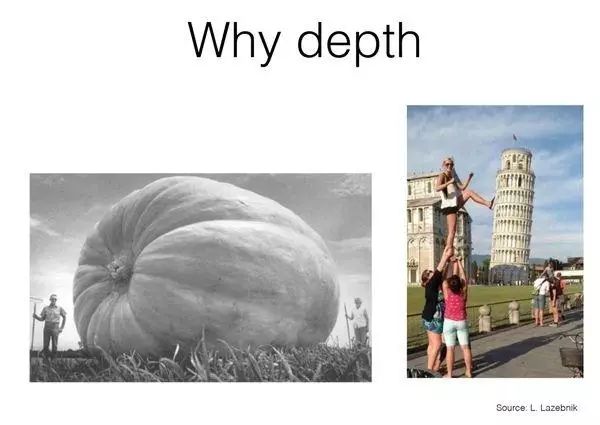
另一方面,单目相机也无法依靠一张图像获得图像中物体离自己的相对距离。
但这两个问题都有对应的解决办法。比如,通过借助 GPU 和 IMU(Inertial Measurement Unit,惯性测量器件)确定物体的大小,依靠运动中的三角测量,来求解相机运动并估计像素的空间位置。
双目 SLAM 消除了单目的很多麻烦。双目视觉和人眼类似,通过左右眼图像的差异来计算距离——也就是所谓的立体视觉(Stereo)。
但双目 SLAM 的计算量非常大,通常需要用到可编程门阵列 FPGA。而且其其深度量程也受双目的基线与分辨率限制。










