栗子 夏乙 发自 凹非寺
量子位 报道 | 公众号 QbitAI
五根手指、24个关节,这只机械手从结构到大小,方方面面都像极了人类的手。
在OpenAI的实验室里,它缓缓
盘着核桃
转动着一个木块。没有人告诉它该动哪根指头,驱使它的,是在模拟器里训练出来的强化学习算法。
这套灵巧的系统,叫做
Dactyl
。
它可以把一个正方体,转到指定的方向。
没有人指挥它,哪根手指往哪个方向用力,收到的指令只是
木块的朝向
(I在前,E在左,N在上) 而已。
当然,动作并不像人类盘核桃那样一气呵成,机器人要一步一步来。
神经网络训练的过程中,自学了许多不同的分解动作。比如上图,用两个手指轻轻夹住方块,再用其他手指拨一拨,方块就转起来了。
再比如,推着方块在掌心滑动 (Sliding) 。还有,底面用不离开手心,但方块依然水平转动 (Finger Gaiting) ,堪称盘核桃的核心技巧。
这些技能,Dactyl都是在模拟器里学会的。不过,它能顺利地把技能迁到现实世界,就算物体不是方块,也能随机应变。
从二指夹具到五指机械手
如果你关注机器人技能的进展,大概会发现这样的机械手,远不如两根指头的夹子常见。
各大门派都在用二指夹具,通过各种方法学习着抓取、放置、横扫等动作。
比如OpenAI自己,就展示过二指夹具的抓东西扔东西技能:
Google,曾经出动了大量的二指夹具来学习抓取:

在
李飞飞夫妇实验室学习抓锤子的机器人
,也同样是两根手指:

控制相对简单,成本相对低廉,对于那些靠抓住、放开就能解决的问题来说,机械臂的确是个好选择。
但面对文章开头展示的那些复杂动作,两根指头就先天不足了。
更何况,人类对于和自己相似的物体,有着迷之热情的追求。
像人手一样的机械手发展得如何呢?虽说已经出现了几十年,但它们操纵物体的能力一直很有限。
OpenAI说,要靠传统的机器人学方法来解决灵巧操控问题,太慢了。
《纽约时报》说,按传统的方法,机械手只能做大量工程师编了程的事情。
现在,OpenAI展示了机械手自己学习更复杂的操作的能力。

他们所用的这只结构上高度仿真的手,来自英国Shadow Robot公司。
在这只手上,OpenAI花了大价钱。Shadow官方网站没有明码标价,而根据机器人网站Android World显示,买这样一只机械手要花掉119700美元,差一点点就到了12万。
不让它多掌握点技能,哪对得起这12万刀。OpenAI要教这只机械手来转动各种各样的物体,每一种形状都重新编程当然不行。
另外,这只手有24个自由度,要控制的维度就比传统7自由度机械臂多了两倍。
OpenAI还想让它在真正的现实世界中工作,于是,传感器获取的信息又嘈杂又有延迟,有时候,当一个指尖的传感器被其他指头挡住,算法还得靠不完整的信息来运转。
面对种种困难和5根“手指”,他们祭出了前不久训练AI打DotA2所用的算法。
OpenAI Five,跨界了。
盘核桃技能习得之路
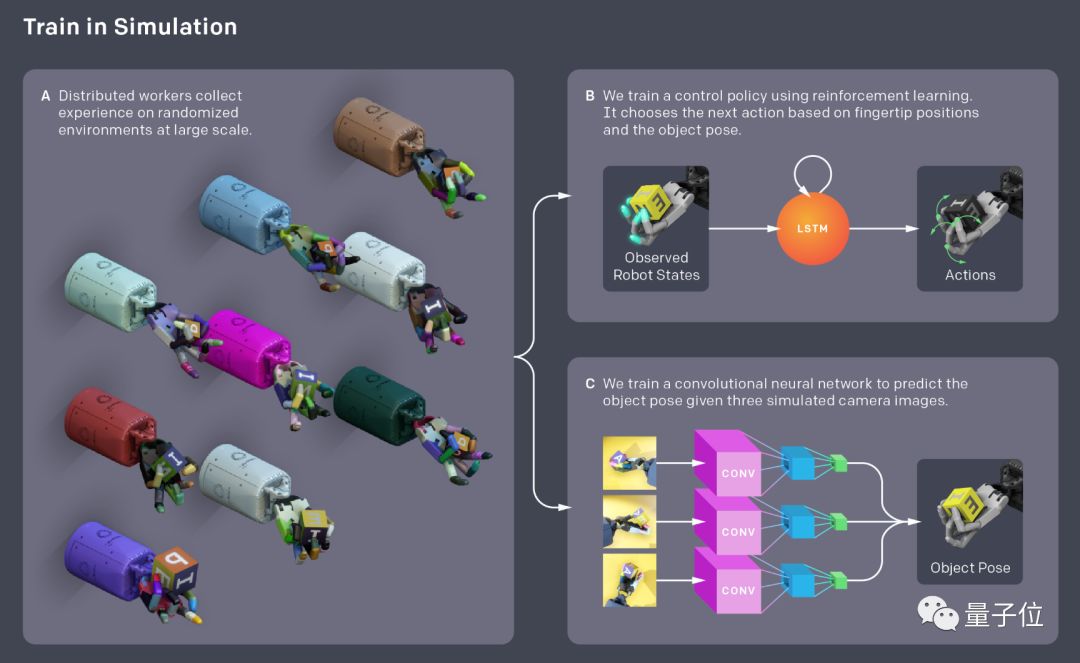
Dactyl模型里,有两个神经网络各司其职:一是
视觉
网络,二是
控制
网络。
简单来说,要了解物体的情况,再把它转到对的方向。
两个网络,都是为了
随机应变
而生,用的方法叫做“域随机化 (Domain Randomization) ”。
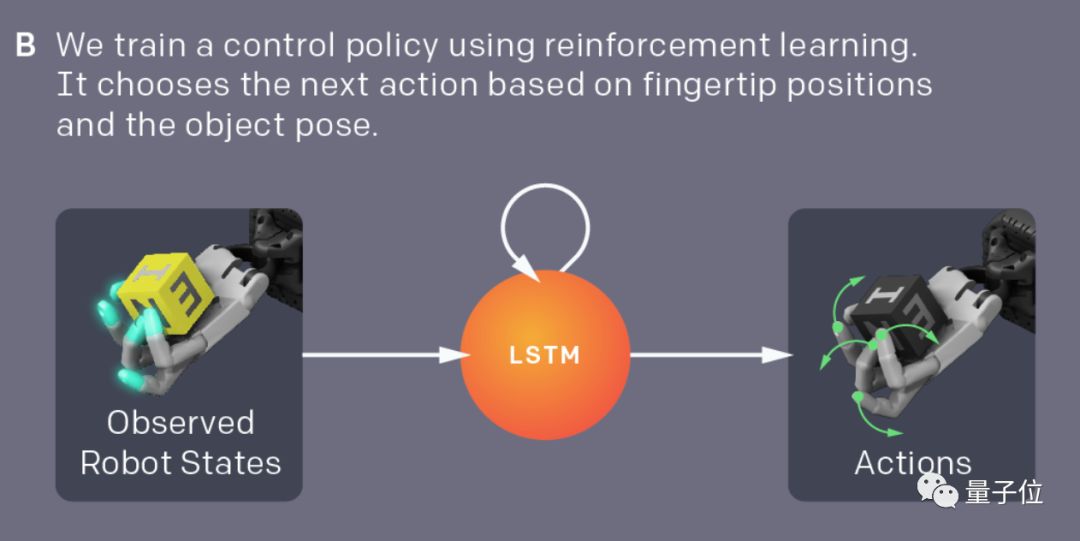
控制网络
先来说
控制网络
,这个网络是在MoJoCo物理引擎里面,搭了个模拟器来训练的。
不过,研究人员并不希望AI过度依赖物理原理。因为,传感器的测量数据可能嘈杂,也可能有延时,且随着时间的推移,机器人会受伤会老化,物理性质也会发生变化。
而要把技能推广到真实环境,就更加需要应付
多变的环境
。
所以,这个模拟器只是对物理世界的一个“粗略近似 (Coarse Approximation) ”。
除此之外,为了培养AI的应变能力,模拟器提供了各种各样的场景,物体的物理性质和外观都可以发生非常丰富的变化。
如果,一个强化学习策略,在所有的模拟场景里,都能完成任务,那么它到了真实世界,也更容易来者不拒。
这也不是全部,团队希望机器人可以在不同环境下,选择不同的动作来执行任务,于是用了
LSTM
来赋予AI一些记忆。没有这些记忆的话,机械手需要
两倍
的转动次数,才能把物体捧在正确的方向。
成就了刀塔AI战队的Rapid,是一个
规模化
的近端策略优化系统。在这里,Dactyl用6144个CPU核加上8个GPU,训练了50小时,相当于尘世的一百年。
视觉网络
训练之初,Dactyl就是朝着“
转动随机物体
”的目标去的,因为世界也不是只有正方体那样单调。
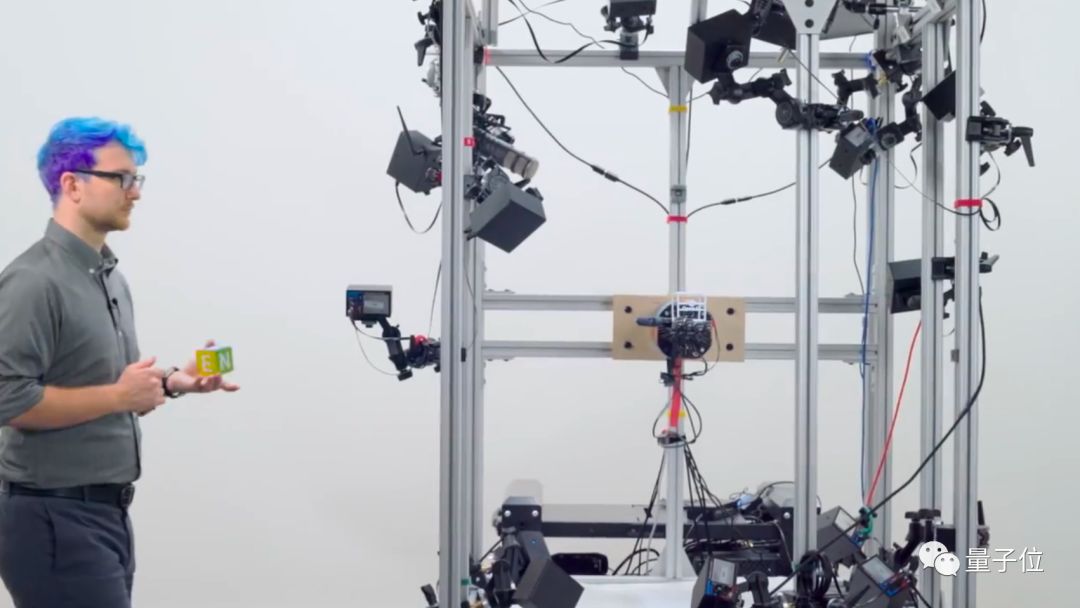
所以,视觉的部分,用了很普通的RGB摄像头,数据用来估计物体的位置和朝向,不需要太精确。
三枚摄像头围在机器人身边,解决了模糊和遮挡的问题,足矣。
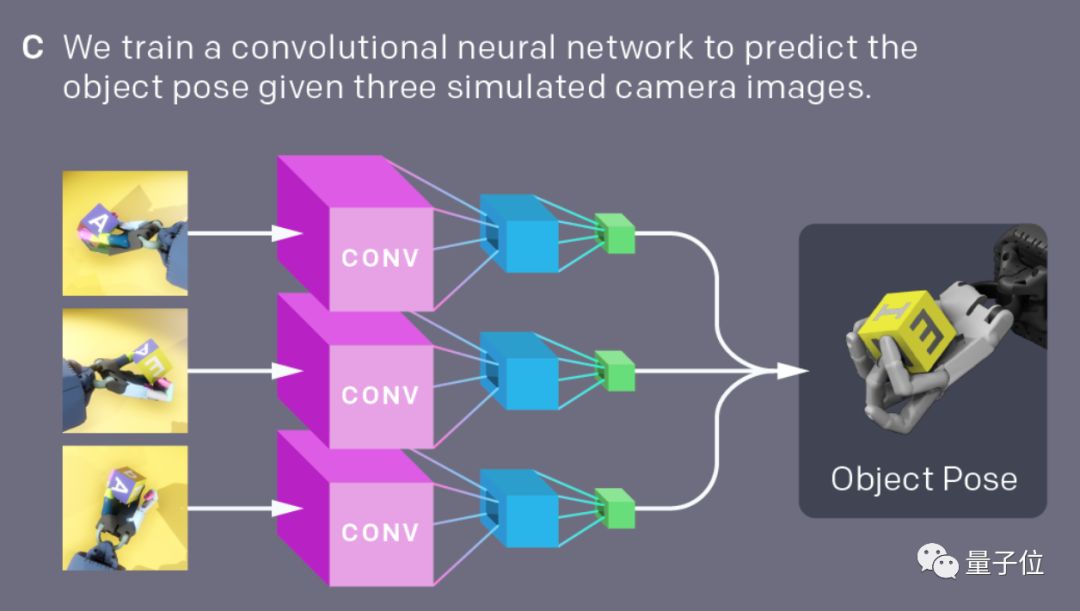
一个
卷积神经网络
(CNN) ,会把摄像头拍到的视频吃下去,估算物体的位置和方向,再用这些信息来指挥
控制网络
选取合适的操作。
这个网络的训练,不是在MUJOCO里,而是Unity游戏引擎,后者的视觉场景更为丰富,给了Dactyl千锤百炼的机会。
两个网络是分开训练的,但合体之后便能直接走进真实世界,微调都不需要。
OpenAI踩过的坑
除了展示成果,OpenAI的科学家们还热情地公开了采过的坑:这些方法我们试了,没用。
坑有两个:
除此之外,在实验过程中,OpenAI科学家们的认知还被颠覆了几次:










