Overview
The objective of this project is to identify and tracking road vehicles using traditional computer vision and machine learning techniques such as the histogram of oriented gradients (HOG) and support vector machines (SVM). In the first phase of the project, we trained a vehicle classification model using Linear SVM algorithm. The HOG, Color Histograms, and Special Binning techniques were used to extract features. Next, using sliding window technique, we extracted imaged patches from road images. Those image patches were used to extract features. The generated features were used as the input for your machine learning model. The output of the SVM model indicates whether the given patch is a vehicle or not. After removing duplicate detections and false positives, bounding boxes were drawn to indicate vehicles.
Following animation shows the performance of our final model against a road video.
Vehicle Detection Pipeline
The following figure shows the vehicle detection pipeline we used for the project. As the picture depicted, pipeline starts with the sliding window stage. Next, the extracted image patches went to the feature generation stage. Generated features are used as the input of the SVM algorithm. Based on the output of the machine learning model, we updated the heat map. Finally, the heat map was thresholded to extract vehicle bounding boxes.
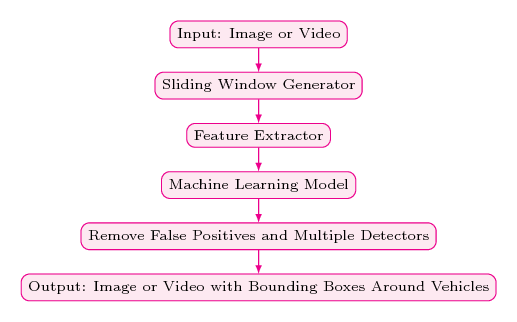
Next, we are going to discuss these pipeline stages in detail.
链接:
https://github.com/upul/CarND-Vehicle-Detection
原文链接:
http://weibo.com/5501429448/ExijwxID0?from=page_1005055501429448_profile&wvr=6&mod=weibotime&type=comment#_rnd1488113588163










